The Vector Autoregressive Model
Ivan Jacob Agaloos Pesigan
2026-03-25
Source:vignettes/var.Rmd
var.RmdModel
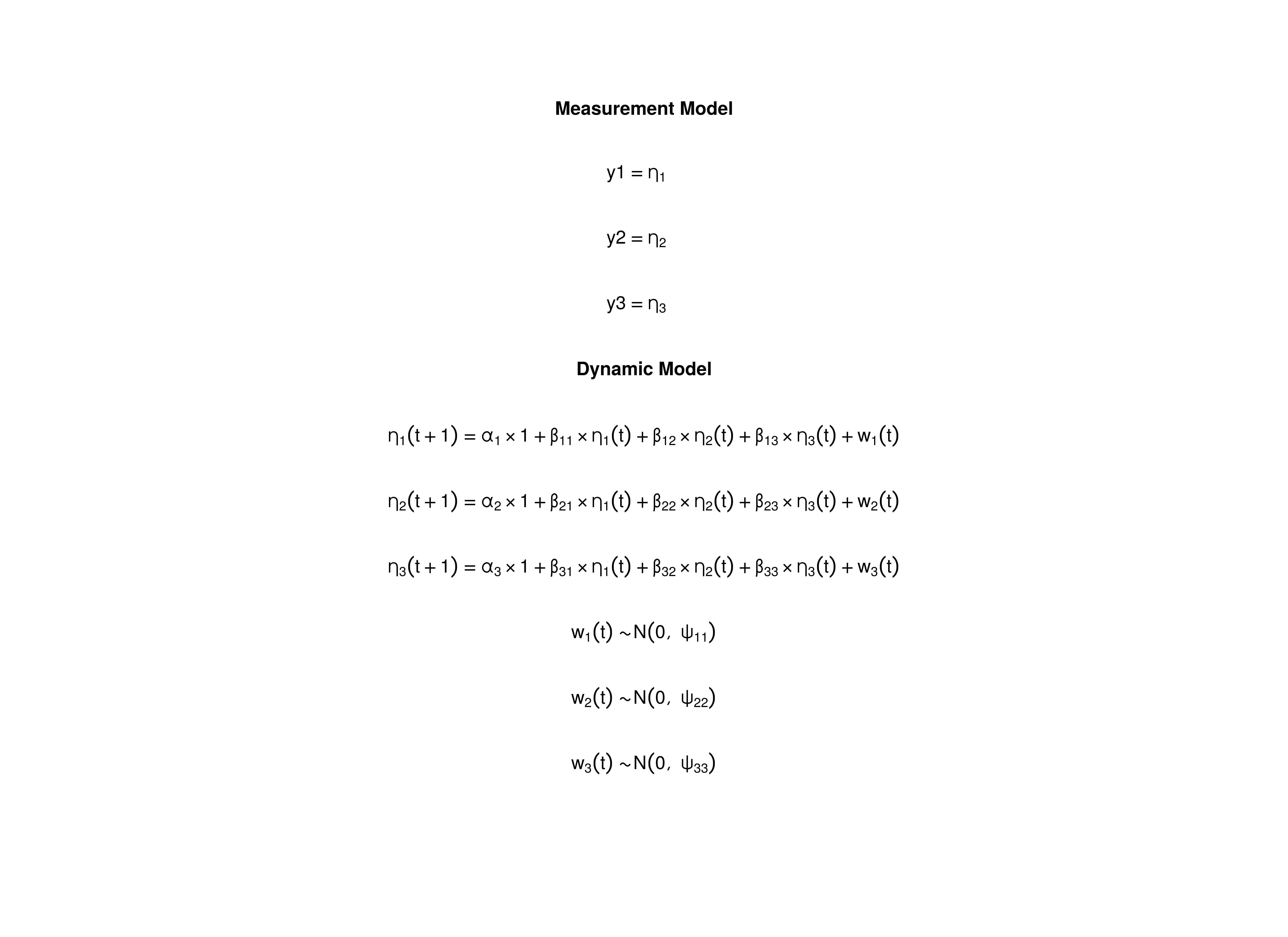
The measurement model is given by where represents a vector of observed variables and a vector of latent variables for individual and time . Since the observed and latent variables are equal, we only generate data from the dynamic structure.
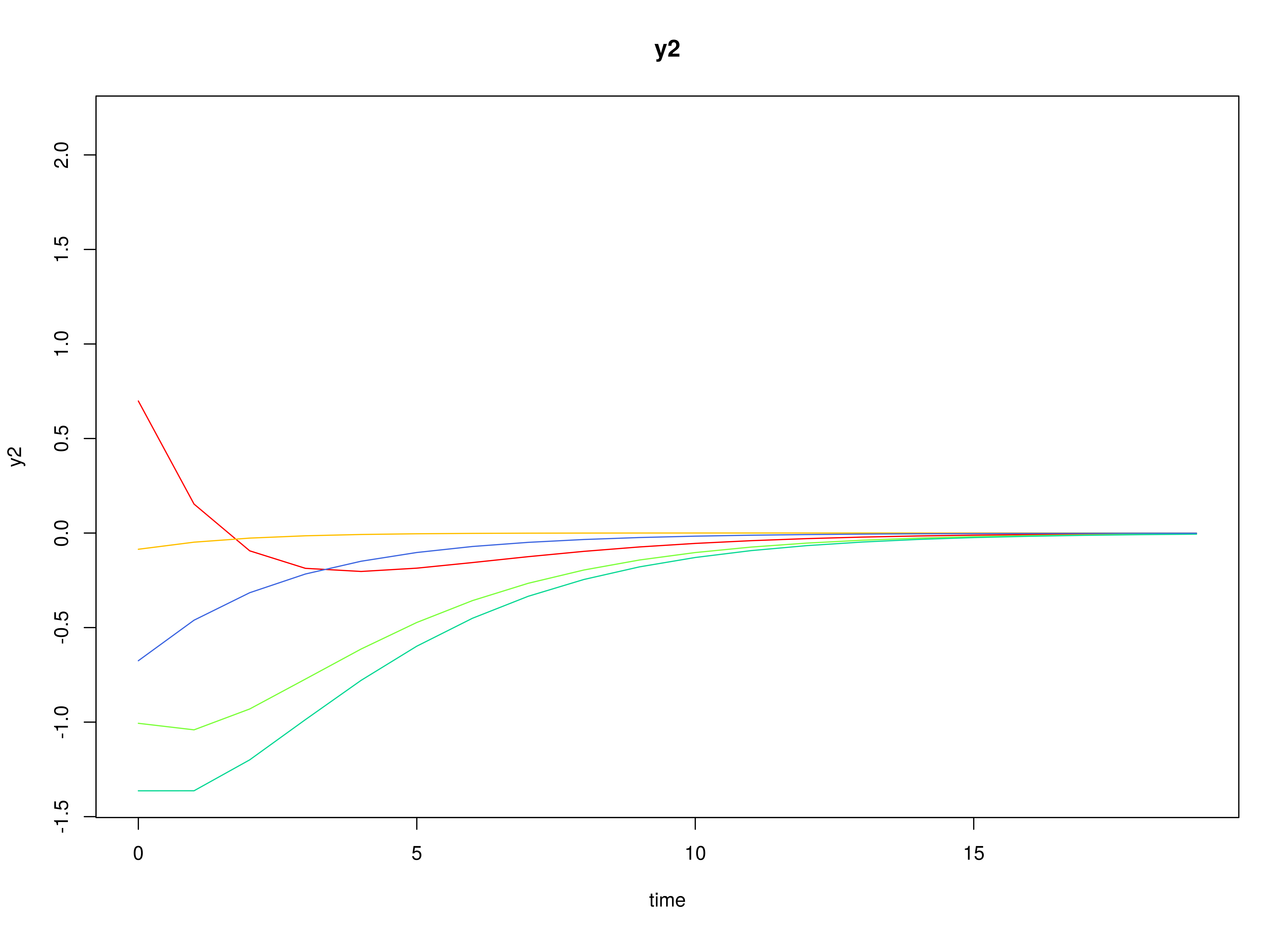
The dynamic structure is given by where , , and are random variables, and , , and are model parameters. Here, is a vector of latent variables at time and individual , represents a vector of latent variables at time and individual , and represents a vector of dynamic noise at time and individual . denotes a vector of intercepts, a matrix of autoregression and cross regression coefficients, and the covariance matrix of .
An alternative representation of the dynamic noise is given by where .
Data Generation
Notation
Let be the number of time points and be the number of individuals.
Let the initial condition be given by
Let the constant vector be given by
Let the transition matrix be given by
Let the dynamic process noise be given by
R Function Arguments
n
#> [1] 100
time
#> [1] 1000
mu0
#> [1] 0 0 0
sigma0
#> [,1] [,2] [,3]
#> [1,] 0.19607843 0.1183232 0.02985385
#> [2,] 0.11832319 0.3437711 0.13818551
#> [3,] 0.02985385 0.1381855 0.26638284
sigma0_l # sigma0_l <- t(chol(sigma0))
#> [,1] [,2] [,3]
#> [1,] 0.44280744 0.0000000 0.000000
#> [2,] 0.26721139 0.5218900 0.000000
#> [3,] 0.06741949 0.2302597 0.456966
alpha
#> [1] 0 0 0
beta
#> [,1] [,2] [,3]
#> [1,] 0.7 0.0 0.0
#> [2,] 0.5 0.6 0.0
#> [3,] -0.1 0.4 0.5
psi
#> [,1] [,2] [,3]
#> [1,] 0.1 0.0 0.0
#> [2,] 0.0 0.1 0.0
#> [3,] 0.0 0.0 0.1
psi_l # psi_l <- t(chol(psi))
#> [,1] [,2] [,3]
#> [1,] 0.3162278 0.0000000 0.0000000
#> [2,] 0.0000000 0.3162278 0.0000000
#> [3,] 0.0000000 0.0000000 0.3162278

Using the SimSSMVARFixed Function from the
simStateSpace Package to Simulate Data
library(simStateSpace)
sim <- SimSSMVARFixed(
n = n,
time = time,
mu0 = mu0,
sigma0_l = sigma0_l,
alpha = alpha,
beta = beta,
psi_l = psi_l
)
data <- as.data.frame(sim)
head(data)
#> id time y1 y2 y3
#> 1 1 0 -0.81728749 0.01319023 0.57975035
#> 2 1 1 -0.62264147 -0.94877859 0.54422379
#> 3 1 2 -0.06731464 -0.69530903 -0.09626706
#> 4 1 3 -0.09174342 -0.44804477 -0.27983813
#> 5 1 4 -0.04104160 -0.72769549 -0.19238403
#> 6 1 5 0.18907246 -0.81602072 -0.73831208
summary(data)
#> id time y1 y2
#> Min. : 1.00 Min. : 0.0 Min. :-1.9239387 Min. :-2.6896682
#> 1st Qu.: 25.75 1st Qu.:249.8 1st Qu.:-0.2991519 1st Qu.:-0.3940385
#> Median : 50.50 Median :499.5 Median :-0.0029441 Median : 0.0008316
#> Mean : 50.50 Mean :499.5 Mean :-0.0005164 Mean : 0.0004548
#> 3rd Qu.: 75.25 3rd Qu.:749.2 3rd Qu.: 0.2957664 3rd Qu.: 0.3976987
#> Max. :100.00 Max. :999.0 Max. : 1.9753039 Max. : 2.3189032
#> y3
#> Min. :-2.185100
#> 1st Qu.:-0.343439
#> Median : 0.001899
#> Mean : 0.002713
#> 3rd Qu.: 0.351819
#> Max. : 2.113439
plot(sim)


Model Fitting
Prepare Initial Condition
dynr_initial <- dynr::prep.initial(
values.inistate = mu0,
params.inistate = c("mu0_1_1", "mu0_2_1", "mu0_3_1"),
values.inicov = sigma0,
params.inicov = matrix(
data = c(
"sigma0_1_1", "sigma0_2_1", "sigma0_3_1",
"sigma0_2_1", "sigma0_2_2", "sigma0_3_2",
"sigma0_3_1", "sigma0_3_2", "sigma0_3_3"
),
nrow = 3
)
)Prepare Measurement Model
dynr_measurement <- dynr::prep.measurement(
values.load = diag(3),
params.load = matrix(data = "fixed", nrow = 3, ncol = 3),
state.names = c("eta_1", "eta_2", "eta_3"),
obs.names = c("y1", "y2", "y3")
)Prepare Dynamic Process
dynr_dynamics <- dynr::prep.formulaDynamics(
formula = list(
eta_1 ~ alpha_1_1 * 1 + beta_1_1 * eta_1 + beta_1_2 * eta_2 + beta_1_3 * eta_3,
eta_2 ~ alpha_2_1 * 1 + beta_2_1 * eta_1 + beta_2_2 * eta_2 + beta_2_3 * eta_3,
eta_3 ~ alpha_3_1 * 1 + beta_3_1 * eta_1 + beta_3_2 * eta_2 + beta_3_3 * eta_3
),
startval = c(
alpha_1_1 = alpha[1], alpha_2_1 = alpha[2], alpha_3_1 = alpha[3],
beta_1_1 = beta[1, 1], beta_1_2 = beta[1, 2], beta_1_3 = beta[1, 3],
beta_2_1 = beta[2, 1], beta_2_2 = beta[2, 2], beta_2_3 = beta[2, 3],
beta_3_1 = beta[3, 1], beta_3_2 = beta[3, 2], beta_3_3 = beta[3, 3]
),
isContinuousTime = FALSE
)Prepare Process Noise
dynr_noise <- dynr::prep.noise(
values.latent = psi,
params.latent = matrix(
data = c(
"psi_1_1", "psi_2_1", "psi_3_1",
"psi_2_1", "psi_2_2", "psi_3_2",
"psi_3_1", "psi_3_2", "psi_3_3"
),
nrow = 3
),
values.observed = matrix(data = 0, nrow = 3, ncol = 3),
params.observed = matrix(data = "fixed", nrow = 3, ncol = 3)
)Prepare the Model
model <- dynr::dynr.model(
data = dynr_data,
initial = dynr_initial,
measurement = dynr_measurement,
dynamics = dynr_dynamics,
noise = dynr_noise,
outfile = "var.c"
)
Fit the Model
results <- dynr::dynr.cook(
model,
debug_flag = TRUE,
verbose = FALSE
)
#> [1] "Get ready!!!!"
#> using C compiler: ‘gcc (Ubuntu 13.3.0-6ubuntu2~24.04.1) 13.3.0’
#> Optimization function called.
#> Starting Hessian calculation ...
#> Finished Hessian calculation.
#> Original exit flag: 3
#> Modified exit flag: 3
#> Optimization terminated successfully: ftol_rel or ftol_abs was reached.
#> Original fitted parameters: -0.0002106187 0.0002611955 0.0009243713 0.6972055
#> 0.000612338 0.002917168 0.4995238 0.6005427 -0.001770819 -0.1015684 0.4031293
#> 0.4972227 -2.301822 -0.003746233 0.001270917 -2.306638 0.002932052 -2.304454
#> -0.03405399 0.08081095 0.1345955 -1.449063 0.6212101 0.02495326 -1.163541
#> 0.3906056 -1.540209
#>
#> Transformed fitted parameters: -0.0002106187 0.0002611955 0.0009243713
#> 0.6972055 0.000612338 0.002917168 0.4995238 0.6005427 -0.001770819 -0.1015684
#> 0.4031293 0.4972227 0.1000764 -0.0003749094 0.0001271888 0.09959695
#> 0.0002915429 0.09981433 -0.03405399 0.08081095 0.1345955 0.2347903 0.1458541
#> 0.005858781 0.4029842 0.1256562 0.2621428
#>
#> Doing end processing
#> Successful trial
#> Total Time: 22.78102
#> Backend Time: 22.77481Summary
summary(results)
#> Coefficients:
#> Estimate Std. Error t value ci.lower ci.upper Pr(>|t|)
#> alpha_1_1 -0.0002106 0.0010009 -0.210 -0.0021723 0.0017511 0.4167
#> alpha_2_1 0.0002612 0.0009985 0.262 -0.0016958 0.0022182 0.3968
#> alpha_3_1 0.0009244 0.0009996 0.925 -0.0010348 0.0028835 0.1775
#> beta_1_1 0.6972055 0.0025524 273.152 0.6922028 0.7022083 <2e-16 ***
#> beta_1_2 0.0006123 0.0021517 0.285 -0.0036049 0.0048296 0.3880
#> beta_1_3 0.0029172 0.0021941 1.330 -0.0013832 0.0072176 0.0918 .
#> beta_2_1 0.4995238 0.0025463 196.173 0.4945330 0.5045145 <2e-16 ***
#> beta_2_2 0.6005427 0.0021468 279.743 0.5963351 0.6047503 <2e-16 ***
#> beta_2_3 -0.0017708 0.0021890 -0.809 -0.0060611 0.0025195 0.2093
#> beta_3_1 -0.1015684 0.0025490 -39.846 -0.1065644 -0.0965724 <2e-16 ***
#> beta_3_2 0.4031293 0.0021489 187.594 0.3989174 0.4073411 <2e-16 ***
#> beta_3_3 0.4972227 0.0021913 226.908 0.4929278 0.5015176 <2e-16 ***
#> psi_1_1 0.1000764 0.0004478 223.505 0.0991988 0.1009540 <2e-16 ***
#> psi_2_1 -0.0003749 0.0003159 -1.187 -0.0009940 0.0002442 0.1176
#> psi_3_1 0.0001272 0.0003162 0.402 -0.0004925 0.0007469 0.3437
#> psi_2_2 0.0995969 0.0004456 223.497 0.0987235 0.1004704 <2e-16 ***
#> psi_3_2 0.0002915 0.0003154 0.924 -0.0003267 0.0009098 0.1777
#> psi_3_3 0.0998143 0.0004466 223.504 0.0989390 0.1006896 <2e-16 ***
#> mu0_1_1 -0.0340540 0.0484829 -0.702 -0.1290787 0.0609707 0.2412
#> mu0_2_1 0.0808110 0.0634974 1.273 -0.0436417 0.2052637 0.1016
#> mu0_3_1 0.1345955 0.0512695 2.625 0.0341091 0.2350818 0.0043 **
#> sigma0_1_1 0.2347903 0.0331763 7.077 0.1697659 0.2998146 <2e-16 ***
#> sigma0_2_1 0.1458541 0.0341145 4.275 0.0789909 0.2127173 <2e-16 ***
#> sigma0_3_1 0.0058588 0.0248029 0.236 -0.0427540 0.0544716 0.4066
#> sigma0_2_2 0.4029842 0.0569020 7.082 0.2914582 0.5145101 <2e-16 ***
#> sigma0_3_2 0.1256562 0.0347901 3.612 0.0574688 0.1938435 0.0002 ***
#> sigma0_3_3 0.2621428 0.0370273 7.080 0.1895705 0.3347150 <2e-16 ***
#> ---
#> Signif. codes: 0 '***' 0.001 '**' 0.01 '*' 0.05 '.' 0.1 ' ' 1
#>
#> -2 log-likelihood value at convergence = 160369.89
#> AIC = 160423.89
#> BIC = 160680.73Parameter Estimates
alpha_hat
#> [1] -0.0002106187 0.0002611955 0.0009243713
beta_hat
#> [,1] [,2] [,3]
#> [1,] 0.6972055 0.000612338 0.002917168
#> [2,] 0.4995238 0.600542683 -0.001770819
#> [3,] -0.1015684 0.403129294 0.497222696
psi_hat
#> [,1] [,2] [,3]
#> [1,] 0.1000763736 -0.0003749094 0.0001271888
#> [2,] -0.0003749094 0.0995969478 0.0002915429
#> [3,] 0.0001271888 0.0002915429 0.0998143329
mu0_hat
#> [1] -0.03405399 0.08081095 0.13459547
sigma0_hat
#> [,1] [,2] [,3]
#> [1,] 0.234790256 0.1458541 0.005858781
#> [2,] 0.145854085 0.4029842 0.125656175
#> [3,] 0.005858781 0.1256562 0.262142778