The Linear Growth Curve Model
Ivan Jacob Agaloos Pesigan
2026-03-25
Source:vignettes/lin-growth.Rmd
lin-growth.RmdModel
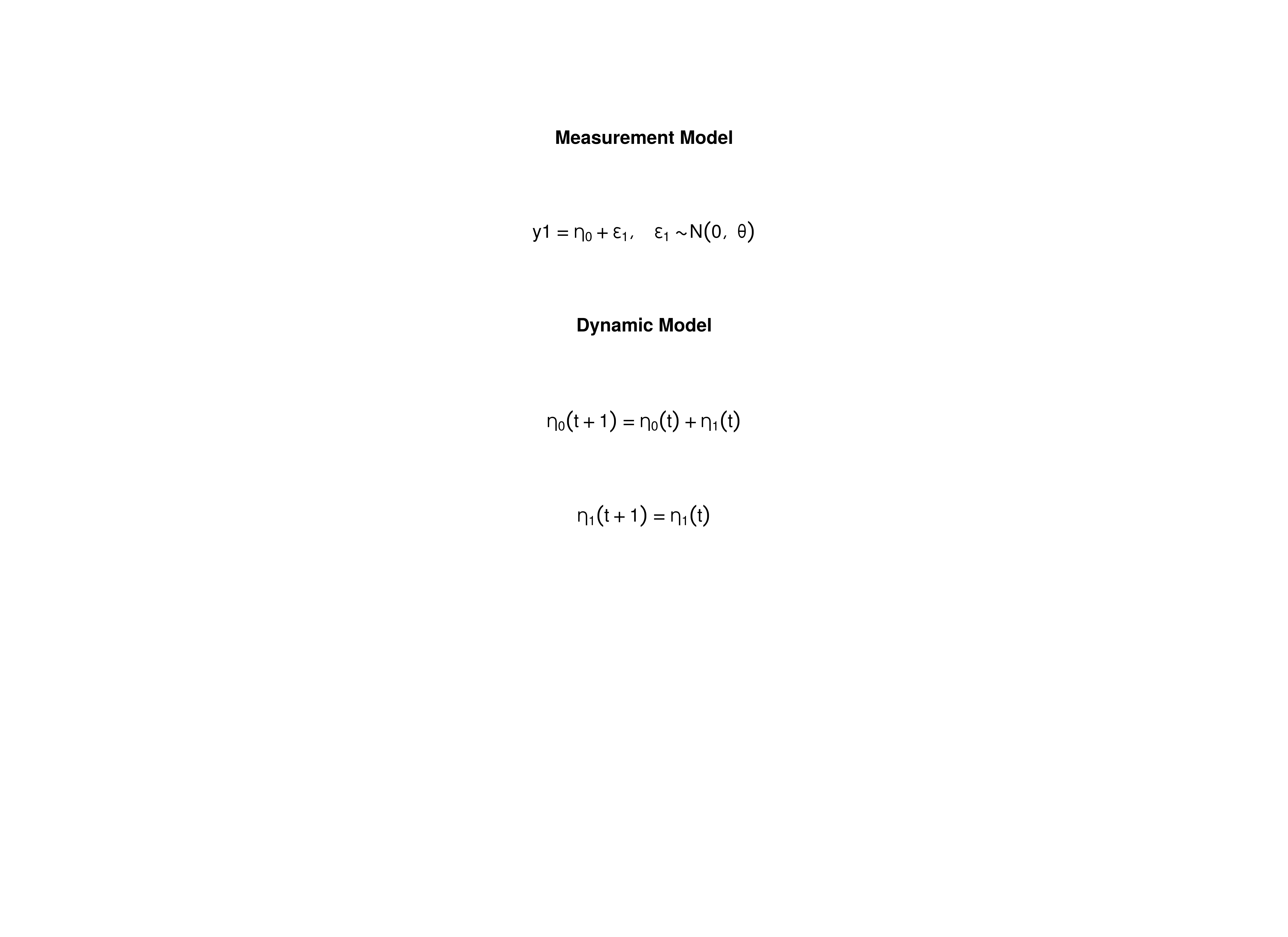
The measurement model is given by where , , , and are random variables and is a model parameter. is the observed random variable at time and individual , (intercept) and (slope) form a vector of latent random variables at time and individual , and a vector of random measurement errors at time and individual . is the variance of .
The dynamic structure is given by
The mean vector and covariance matrix of the intercept and slope are captured in the mean vector and covariance matrix of the initial condition given by
Data Generation
Notation
Let be the number of time points and be the number of individuals.
Let the measurement error variance be given by
Let the initial condition be given by
R Function Arguments
n
#> [1] 10000
time
#> [1] 5
mu0
#> [1] 0.615 1.006
sigma0
#> [,1] [,2]
#> [1,] 1.932 0.618
#> [2,] 0.618 0.587
sigma0_l # sigma0_l <- t(chol(sigma0))
#> [,1] [,2]
#> [1,] 1.3899640 0.0000000
#> [2,] 0.4446158 0.6239525
theta
#> [1] 0.6
theta_l # theta_l <- t(chol(theta))
#> [1] 0.7745967
Using the SimSSMLinGrowth Function from the
simStateSpace Package to Simulate Data
library(simStateSpace)
sim <- SimSSMLinGrowth(
n = n,
time = time,
mu0 = mu0,
sigma0_l = sigma0_l,
theta_l = theta_l,
type = 0
)
data <- as.data.frame(sim)
head(data)
#> id time y1
#> 1 1 0 1.723564
#> 2 1 1 2.148702
#> 3 1 2 3.384974
#> 4 1 3 6.225426
#> 5 1 4 5.993965
#> 6 2 0 1.951861
summary(data)
#> id time y1
#> Min. : 1 Min. :0 Min. :-10.7863
#> 1st Qu.: 2501 1st Qu.:1 1st Qu.: 0.3943
#> Median : 5000 Median :2 Median : 2.1839
#> Mean : 5000 Mean :2 Mean : 2.5978
#> 3rd Qu.: 7500 3rd Qu.:3 3rd Qu.: 4.4536
#> Max. :10000 Max. :4 Max. : 21.0250
plot(sim)
Model Fitting
Prepare Data
dynr_data <- dynr::dynr.data(
dataframe = data,
id = "id",
time = "time",
observed = "y1"
)
#> Registered S3 method overwritten by 'car':
#> method from
#> na.action.merMod lme4Prepare Initial Condition
dynr_initial <- dynr::prep.initial(
values.inistate = mu0,
params.inistate = c("mu0_0", "mu0_1"),
values.inicov = sigma0,
params.inicov = matrix(
data = c(
"sigma0_00", "sigma0_01",
"sigma0_01", "sigma0_11"
),
nrow = 2
)
)Prepare Measurement Model
dynr_measurement <- dynr::prep.measurement(
values.load = matrix(data = c(1, 0), nrow = 1),
params.load = matrix(data = "fixed", nrow = 1, ncol = 2),
state.names = c("eta_0", "eta_1"),
obs.names = "y1"
)Prepare Dynamic Process
dynr_dynamics <- dynr::prep.formulaDynamics(
formula = list(
eta_0 ~ eta_0 + eta_1,
eta_1 ~ eta_1
),
isContinuousTime = FALSE
)
#> Warning in dynr::prep.formulaDynamics(formula = list(eta_0 ~ eta_0 + eta_1, :
#> You provided no start values: length(startval)==0. If you have no free
#> parameters, keep calm and carry on.Prepare Process Noise
dynr_noise <- dynr::prep.noise(
values.latent = matrix(data = 0, nrow = 2, ncol = 2),
params.latent = matrix(data = "fixed", nrow = 2, ncol = 2),
values.observed = theta,
params.observed = "theta"
)Prepare the Model
model <- dynr::dynr.model(
data = dynr_data,
initial = dynr_initial,
measurement = dynr_measurement,
dynamics = dynr_dynamics,
noise = dynr_noise,
outfile = "lin-growth.c"
)
Fit the Model
results <- dynr::dynr.cook(
model,
debug_flag = TRUE,
verbose = FALSE
)
#> [1] "Get ready!!!!"
#> using C compiler: ‘gcc (Ubuntu 13.3.0-6ubuntu2~24.04.1) 13.3.0’
#> Optimization function called.
#> Starting Hessian calculation ...
#> Finished Hessian calculation.
#> Original exit flag: 3
#> Modified exit flag: 3
#> Optimization terminated successfully: ftol_rel or ftol_abs was reached.
#> Original fitted parameters: -0.5089635 0.60732 0.9952181 0.6477021 0.3152438
#> -0.9463643
#>
#> Transformed fitted parameters: 0.6011183 0.60732 0.9952181 1.911144 0.6024764
#> 0.5780766
#>
#> Doing end processing
#> Successful trial
#> Total Time: 23.30186
#> Backend Time: 22.929Summary
summary(results)
#> Coefficients:
#> Estimate Std. Error t value ci.lower ci.upper Pr(>|t|)
#> theta 0.601118 0.004914 122.34 0.591488 0.610749 <2e-16 ***
#> mu0_0 0.607320 0.015112 40.19 0.577701 0.636939 <2e-16 ***
#> mu0_1 0.995218 0.007992 124.53 0.979554 1.010882 <2e-16 ***
#> sigma0_00 1.911144 0.032346 59.08 1.847747 1.974541 <2e-16 ***
#> sigma0_01 0.602476 0.013016 46.29 0.576966 0.627987 <2e-16 ***
#> sigma0_11 0.578077 0.009046 63.90 0.560347 0.595807 <2e-16 ***
#> ---
#> Signif. codes: 0 '***' 0.001 '**' 0.01 '*' 0.05 '.' 0.1 ' ' 1
#>
#> -2 log-likelihood value at convergence = 167712.56
#> AIC = 167724.56
#> BIC = 167777.48Linear Growth Curve Model in Structural Equation Modeling
Wide Data Set
data <- as.data.frame(sim, long = FALSE)
head(data)
#> id y1_0 y1_1 y1_2 y1_3 y1_4
#> 1 1 1.72356430 2.1487019 3.38497364 6.22542609 5.9939649
#> 2 2 1.95186051 2.6140623 5.60107919 5.59791920 7.6881040
#> 3 3 0.07909854 -1.1410633 -0.02940765 0.07103948 -0.4998955
#> 4 4 -0.14827866 -0.6478676 -0.33440620 -0.29683127 -0.6950588
#> 5 5 1.14625267 2.3844799 0.39101270 -0.76159166 1.6750324
#> 6 6 1.02604168 2.1852479 2.55168739 2.13223414 4.1499727Model
model <- "
# factor loadings
eta0 =~ 1 * y1_0 + 1 * y1_1 + 1 * y1_2 + 1 * y1_3 + 1 * y1_4
eta1 =~ 0 * y1_0 + 1 * y1_1 + 2 * y1_2 + 3 * y1_3 + 4 * y1_4
# means of latent variables
eta0 ~ mu0_0 * 1
eta1 ~ mu0_1 * 1
# variances and covariances of latent variables
eta0 ~~ sigma0_00 * eta0
eta0 ~~ sigma0_01 * eta1
eta1 ~~ sigma0_11 * eta1
# constrain error variance theta to be equal
y1_0 ~~ theta * y1_0
y1_1 ~~ theta * y1_1
y1_2 ~~ theta * y1_2
y1_3 ~~ theta * y1_3
y1_4 ~~ theta * y1_4
"
fit <- lavaan::growth(
model = model,
data = data
)
lavaan::summary(fit)
#> lavaan 0.6-21 ended normally after 34 iterations
#>
#> Estimator ML
#> Optimization method NLMINB
#> Number of model parameters 10
#> Number of equality constraints 4
#>
#> Number of observations 10000
#>
#> Model Test User Model:
#>
#> Test statistic 5.386
#> Degrees of freedom 14
#> P-value (Chi-square) 0.980
#>
#> Parameter Estimates:
#>
#> Standard errors Standard
#> Information Expected
#> Information saturated (h1) model Structured
#>
#> Latent Variables:
#> Estimate Std.Err z-value P(>|z|)
#> eta0 =~
#> y1_0 1.000
#> y1_1 1.000
#> y1_2 1.000
#> y1_3 1.000
#> y1_4 1.000
#> eta1 =~
#> y1_0 0.000
#> y1_1 1.000
#> y1_2 2.000
#> y1_3 3.000
#> y1_4 4.000
#>
#> Covariances:
#> Estimate Std.Err z-value P(>|z|)
#> eta0 ~~
#> eta1 (s0_0) 0.602 0.013 46.317 0.000
#>
#> Intercepts:
#> Estimate Std.Err z-value P(>|z|)
#> eta0 (m0_0) 0.607 0.015 40.295 0.000
#> eta1 (m0_1) 0.995 0.008 124.582 0.000
#>
#> Variances:
#> Estimate Std.Err z-value P(>|z|)
#> eta0 (s0_0) 1.911 0.032 59.235 0.000
#> eta1 (s0_1) 0.578 0.009 63.955 0.000
#> .y1_0 (thet) 0.601 0.005 122.474 0.000
#> .y1_1 (thet) 0.601 0.005 122.474 0.000
#> .y1_2 (thet) 0.601 0.005 122.474 0.000
#> .y1_3 (thet) 0.601 0.005 122.474 0.000
#> .y1_4 (thet) 0.601 0.005 122.474 0.000#> [1] 0 0References
Chow, S.-M., Ho, M. R., Hamaker, E. L., & Dolan, C. V. (2010).
Equivalence and differences between structural equation modeling and
state-space modeling techniques. Structural Equation Modeling: A
Multidisciplinary Journal, 17(2), 303–332. https://doi.org/10.1080/10705511003661553
Ou, L., Hunter, M. D., & Chow, S.-M. (2019). What’s for dynr: A package for linear and nonlinear dynamic
modeling in R. The R Journal, 11(1), 91.
https://doi.org/10.32614/rj-2019-012
Pesigan, I. J. A., Russell, M. A., & Chow, S.-M. (2025). Inferences
and effect sizes for direct, indirect, and total effects in
continuous-time mediation models. Psychological Methods. https://doi.org/10.1037/met0000779
R Core Team. (2026). R: A language and environment for
statistical computing. R Foundation for Statistical Computing. https://www.R-project.org/
Rosseel, Y. (2012). lavaan: An
R package for structural equation modeling. Journal of
Statistical Software, 48(2). https://doi.org/10.18637/jss.v048.i02