Multivariate Meta-Analysis of Discrete-Time VAR Estimates (Random-Effects Model)
Ivan Jacob Agaloos Pesigan
2025-08-18
Source:vignettes/fit-dt-var-id-random.Rmd
fit-dt-var-id-random.RmdNote: When the discrete-time vector autoregressive model is estimated separately for each ID, any of the parameters can vary across individuals. In this example, however, we are only varying and .
Model
The measurement model is given by where , , and are random variables and , and are model parameters. represents a vector of observed random variables, a vector of latent random variables, and a vector of random measurement errors, at time and individual . denotes a matrix of factor loadings, and the covariance matrix of . In this model, is an identity matrix and is a diagonal matrix.
The dynamic structure is given by where , , and are random variables, and , , and are model parameters. Here, is a vector of latent variables at time and individual , represents a vector of latent variables at time and individual , and represents a vector of dynamic noise at time and individual . denotes a vector of intercepts for individual , a matrix of autoregression and cross regression coefficients for individual , and the covariance matrix of . In this model, is a symmetric matrix.
Data Generation
The parameters used in this example were based on Bringmann et al. (2013).
Notation
Let be the number of time points and be the number of individuals.
Let the measurement model intecept vector be given by
Let the factor loadings matrix be given by
Let the measurement error covariance matrix be given by
Let the initial condition be given by
Let the intercept vector be normally distributed with the following means
and covariance matrix
Let the transition matrix be normally distributed with the following means
and covariance matrix
The SimAlphaN and SimBetaN functions from
the simStateSpace package generates random intercept
vectors and transition matrices from the multivariate normal
distribution. Note that the SimBetaN function generates
transition matrices that are weakly stationary.
Let the dynamic process noise be given by
R Function Arguments
n
#> [1] 1000
time
#> [1] 1000
mu0
#> [[1]]
#> [1] 3.814355 2.576348
sigma0
#> [[1]]
#> [,1] [,2]
#> [1,] 1.3978842 0.5782369
#> [2,] 0.5782369 1.6636513
sigma0_l # sigma0_l <- t(chol(sigma0))
#> [[1]]
#> [,1] [,2]
#> [1,] 1.1823215 0.000000
#> [2,] 0.4890691 1.193509
# first alpha in the list of length n
alpha[[1]]
#> [1] 1.382816 2.056527
# first beta in the list of length n
beta[[1]]
#> [,1] [,2]
#> [1,] 0.21090478 0.00660174
#> [2,] 0.01360809 0.37057228
psi
#> [,1] [,2]
#> [1,] 1.3000000 0.5696315
#> [2,] 0.5696315 1.5600000
psi_l # psi_l <- t(chol(psi))
#> [[1]]
#> [,1] [,2]
#> [1,] 1.1401754 0.000000
#> [2,] 0.4995998 1.144727
nu
#> [[1]]
#> [1] 0 0
lambda
#> [[1]]
#> [,1] [,2]
#> [1,] 1 0
#> [2,] 0 1
theta
#> [,1] [,2]
#> [1,] 0.2 0.0
#> [2,] 0.0 0.2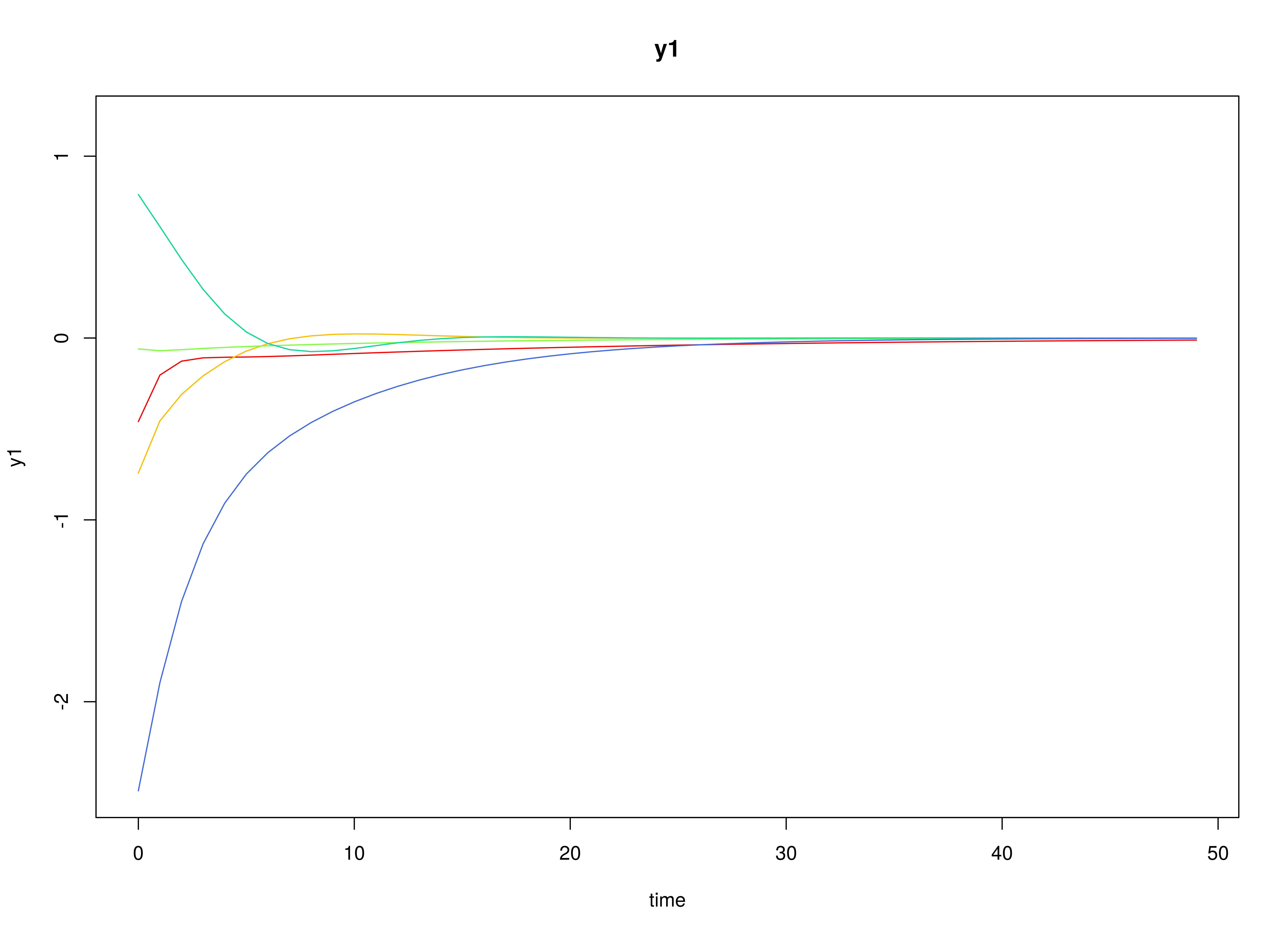
Using the SimSSMIVary Function from the
simStateSpace Package to Simulate Data
library(simStateSpace)
sim <- SimSSMIVary(
n = n,
time = time,
mu0 = mu0,
sigma0_l = sigma0_l,
alpha = alpha,
beta = beta,
psi_l = psi_l,
nu = nu,
lambda = lambda,
theta_l = theta_l
)
data <- as.data.frame(sim)
head(data)
#> id time y1 y2
#> 1 1 0 3.040533 3.202203
#> 2 1 1 3.630653 4.691667
#> 3 1 2 2.621350 5.240797
#> 4 1 3 2.073843 5.555230
#> 5 1 4 2.013430 5.269451
#> 6 1 5 1.677296 2.836631
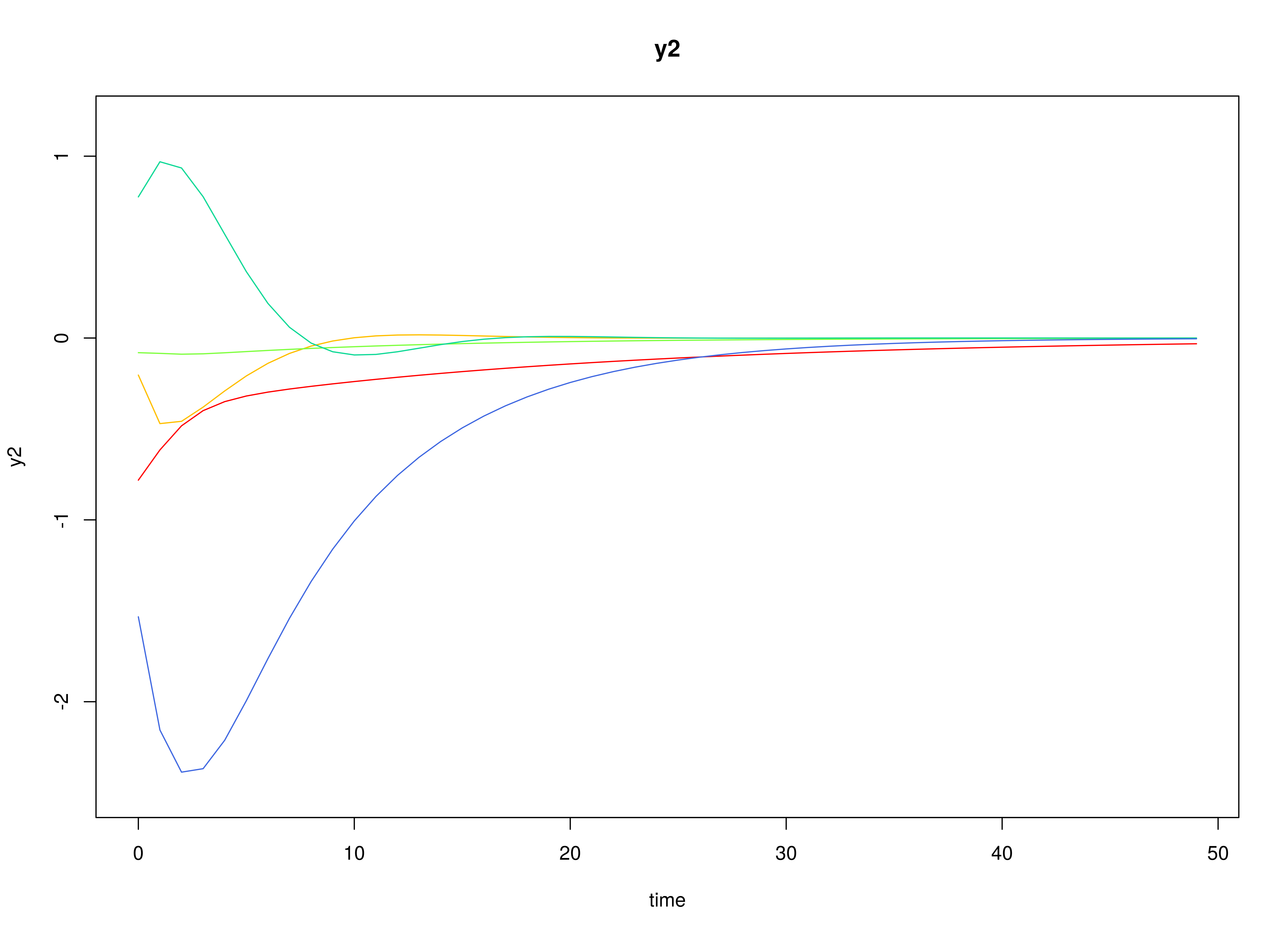
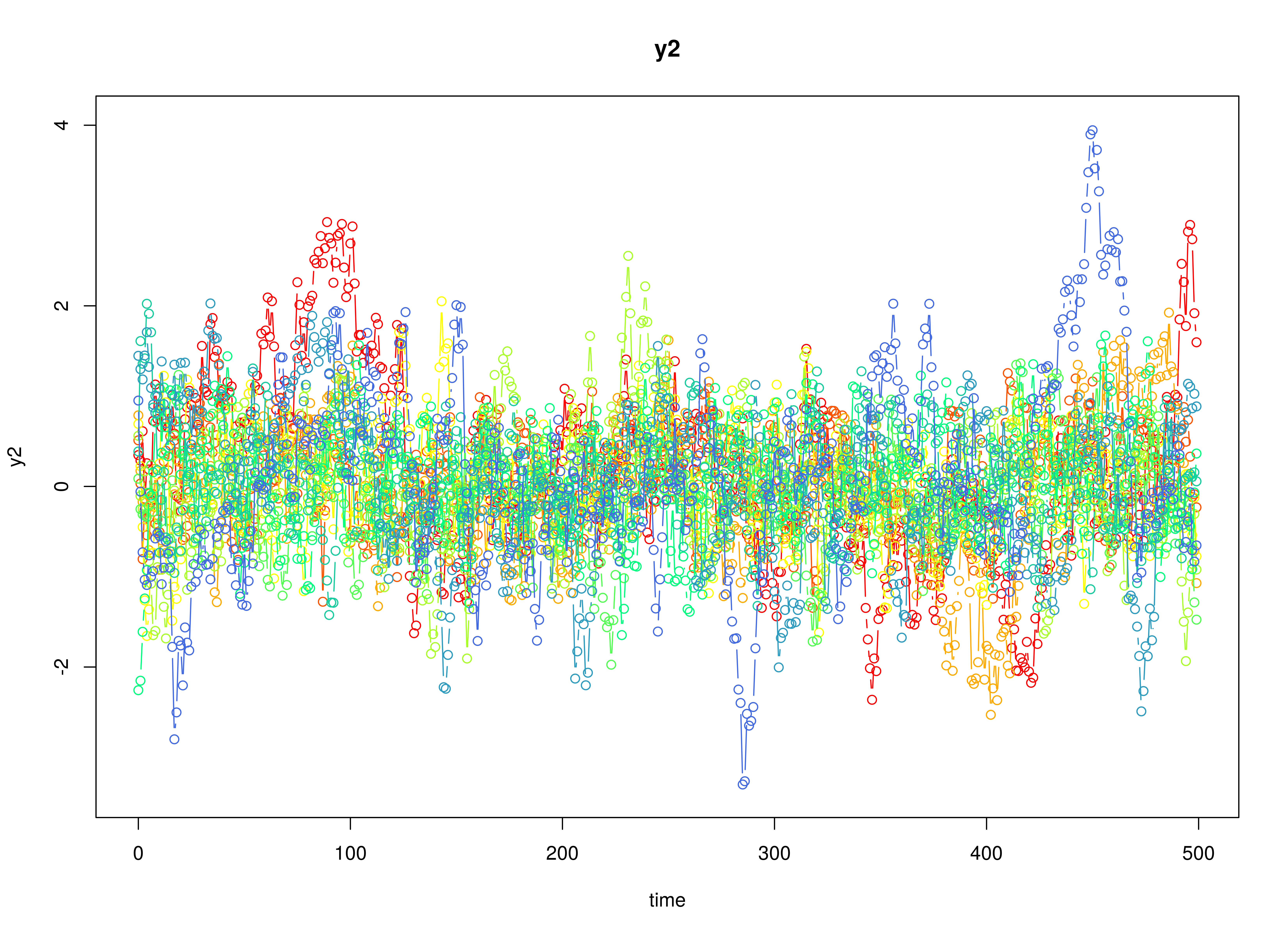
plot(sim)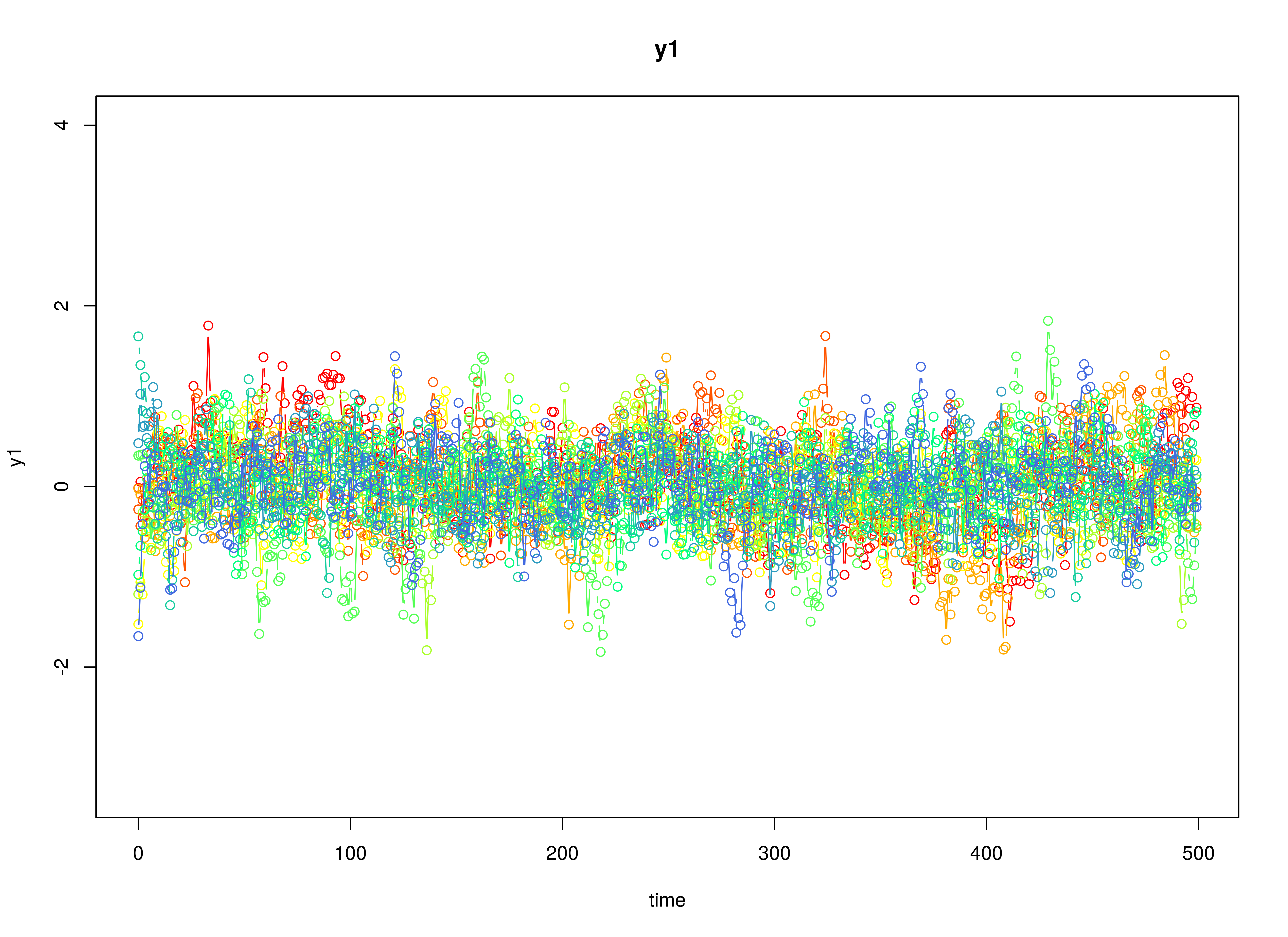
Model Fitting
The FitDTVARIDMx function fits a DT-VAR model on each
individual
.
library(fitDTVARMx)
fit <- FitDTVARIDMx(
data = data,
observed = paste0("y", seq_len(k)),
id = "id",
mu0_values = mu0[[1]],
sigma0_values = sigma0[[1]],
ncores = parallel::detectCores()
)Multivariate Meta-Analysis
The MetaVARMx function performs multivariate
meta-analysis using the estimated parameters and the corresponding
sampling variance-covariance matrix for each individual
.
Estimates with the prefix b0 correspond to the estimates of
beta_mu and alpha_mu. Estimates with the
prefix t2 correspond to the estimates of
beta_sigma and alpha_sigma. Estimates with the
prefix i2 correspond to the estimates of heterogeniety.
library(metaVAR)
meta <- MetaVARMx(
object = fit,
intercept = TRUE,
ncores = parallel::detectCores()
)
#> Running Model with 27 parameters
#>
#> Beginning initial fit attempt
#> Running Model with 27 parameters
#>
#> Lowest minimum so far: 10219.2546092858
#>
#> Solution found#>
#> Solution found! Final fit=10219.255 (started at 36755.244) (1 attempt(s): 1 valid, 0 errors)
#> Start values from best fit:
#> 0.172176323087149,0.0872331149200129,0.0506409957838052,0.195435618555425,2.98880430042743,1.73526790798659,0.556381434337175,-0.353109510117613,0.100488432796781,-0.416966768192526,-2.62888604739992,2.37372360926509,0.356751790512116,-0.0590609265736989,0.0165839459274479,0.279295888611737,-1.36502655242848,0.201233008455563,-0.232579211238073,-0.52462463618858,0.859705901533594,0.248594903277555,0.247482332249011,-0.232085883462846,1.33824250830376,0.0819217334694941,1.16687501844385
summary(meta)
#> est se z p 2.5% 97.5%
#> b0_1 0.1722 0.0180 9.5893 0 0.1370 0.2074
#> b0_2 0.0872 0.0164 5.3256 0 0.0551 0.1193
#> b0_3 0.0506 0.0079 6.3895 0 0.0351 0.0662
#> b0_4 0.1954 0.0174 11.2023 0 0.1612 0.2296
#> b0_5 2.9888 0.0965 30.9798 0 2.7997 3.1779
#> b0_6 1.7353 0.0996 17.4213 0 1.5400 1.9305
#> t2_1_1 0.3096 0.0162 19.1483 0 0.2779 0.3412
#> t2_2_1 -0.1965 0.0123 -15.9209 0 -0.2206 -0.1723
#> t2_3_1 0.0559 0.0072 7.7291 0 0.0417 0.0701
#> t2_4_1 -0.2320 0.0141 -16.4597 0 -0.2596 -0.2044
#> t2_5_1 -1.4627 0.0790 -18.5092 0 -1.6175 -1.3078
#> t2_6_1 1.3207 0.0765 17.2695 0 1.1708 1.4706
#> t2_2_2 0.2520 0.0156 16.1817 0 0.2214 0.2825
#> t2_3_2 -0.0566 0.0051 -11.0389 0 -0.0666 -0.0465
#> t2_4_2 0.1532 0.0112 13.6651 0 0.1312 0.1751
#> t2_5_2 1.0279 0.0645 15.9463 0 0.9016 1.1543
#> t2_6_2 -1.3252 0.0807 -16.4169 0 -1.4834 -1.1670
#> t2_3_3 0.0541 0.0044 12.4057 0 0.0455 0.0626
#> t2_4_3 -0.0897 0.0076 -11.7977 0 -0.1046 -0.0748
#> t2_5_3 -0.3862 0.0417 -9.2723 0 -0.4679 -0.3046
#> t2_6_3 0.4922 0.0378 13.0211 0 0.4181 0.5662
#> t2_4_4 0.2900 0.0158 18.4113 0 0.2592 0.3209
#> t2_5_4 1.2843 0.0752 17.0737 0 1.1369 1.4318
#> t2_6_4 -1.2700 0.0752 -16.8949 0 -1.4174 -1.1227
#> t2_5_5 9.1164 0.4470 20.3967 0 8.2404 9.9924
#> t2_6_5 -7.0203 0.4048 -17.3444 0 -7.8136 -6.2270
#> t2_6_6 9.6591 0.4851 19.9116 0 8.7083 10.6099
#> i2_1 0.9751 0.0013 770.5674 0 0.9727 0.9776
#> i2_2 0.9802 0.0012 817.2680 0 0.9779 0.9826
#> i2_3 0.9392 0.0046 204.0035 0 0.9302 0.9482
#> i2_4 0.9746 0.0013 724.4164 0 0.9719 0.9772
#> i2_5 0.9956 0.0002 4634.8032 0 0.9952 0.9960
#> i2_6 0.9966 0.0002 5872.6729 0 0.9963 0.9969