Multivariate Meta-Analysis of Continuous-Time VAR Estimates (Fixed-Effect Model)
Ivan Jacob Agaloos Pesigan
2024-08-12
Source:vignettes/fit-ct-var-id-fixed.Rmd
fit-ct-var-id-fixed.RmdModel
The measurement model is given by where , , and are random variables and , , and are model parameters. represents a vector of observed random variables, a vector of latent random variables, and a vector of random measurement errors, at time and individual . denotes a vector of intercepts, a matrix of factor loadings, and the covariance matrix of .
An alternative representation of the measurement error is given by where is a vector of independent standard normal random variables and .
The dynamic structure is given by where is the long-term mean or equilibrium level, is the rate of mean reversion, determining how quickly the variable returns to its mean, is the matrix of volatility or randomness in the process, and is a Wiener process or Brownian motion, which represents random fluctuations.
Data Generation
Notation
Let be the number of time points and be the number of individuals.
Let the measurement model intecept vector be given by
Let the factor loadings matrix be given by
Let the measurement error covariance matrix be given by
Let the initial condition be given by
Let the long-term mean vector be given by
Let the rate of mean reversion matrix be given by
Let the dynamic process noise covariance matrix be given by
Let .
R Function Arguments
n
#> [1] 10
time
#> [1] 500
delta_t
#> [1] 0.1
mu0
#> [1] 0 0 0
sigma0
#> [,1] [,2] [,3]
#> [1,] 1.0 0.2 0.2
#> [2,] 0.2 1.0 0.2
#> [3,] 0.2 0.2 1.0
mu
#> [1] 0 0 0
phi
#> [,1] [,2] [,3]
#> [1,] -0.357 0.000 0.000
#> [2,] 0.771 -0.511 0.000
#> [3,] -0.450 0.729 -0.693
sigma
#> [,1] [,2] [,3]
#> [1,] 0.24455556 0.02201587 -0.05004762
#> [2,] 0.02201587 0.07067800 0.01539456
#> [3,] -0.05004762 0.01539456 0.07553061
nu
#> [1] 0 0 0
lambda
#> [,1] [,2] [,3]
#> [1,] 1 0 0
#> [2,] 0 1 0
#> [3,] 0 0 1
theta
#> [,1] [,2] [,3]
#> [1,] 0.2 0.0 0.0
#> [2,] 0.0 0.2 0.0
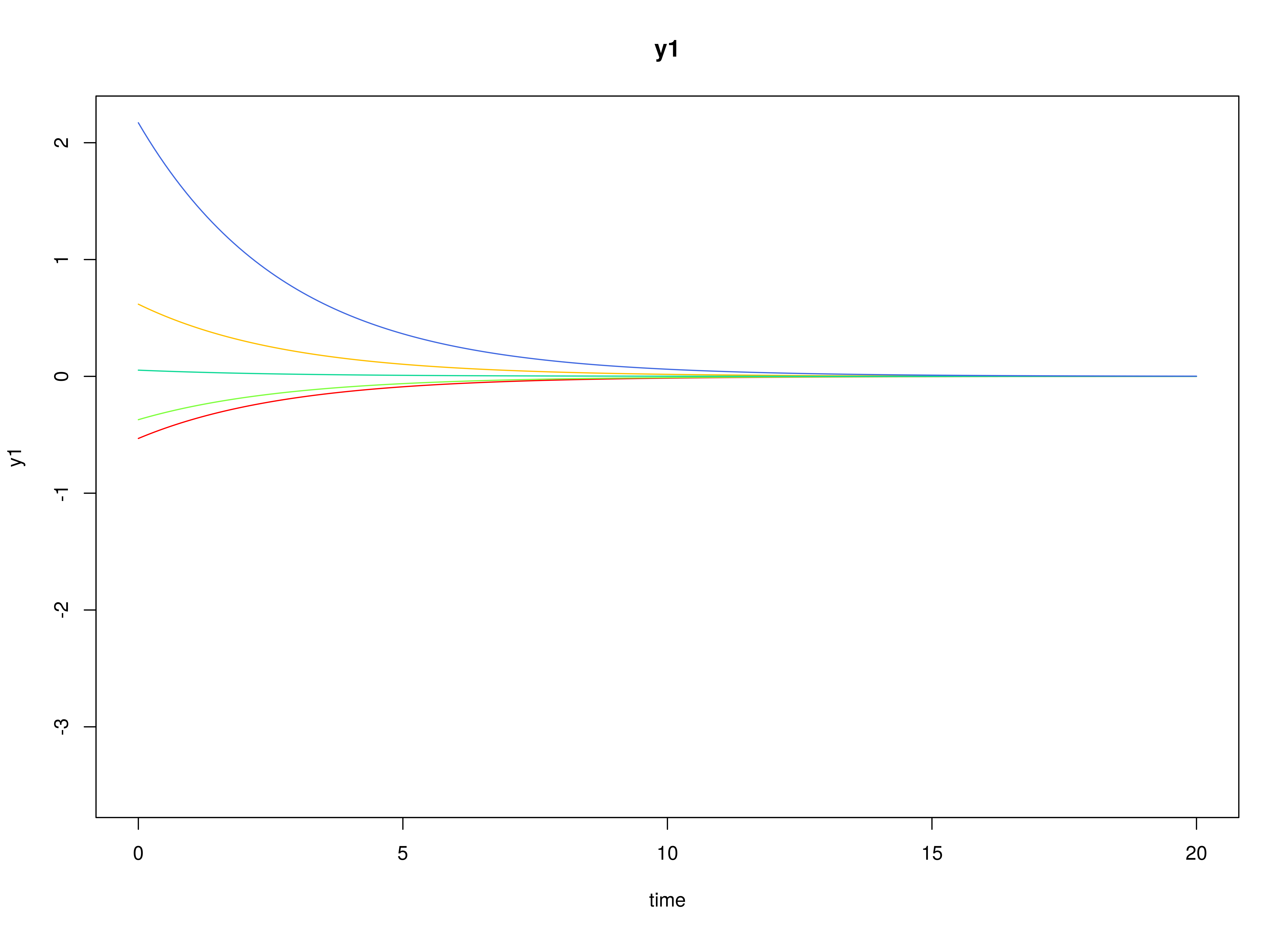
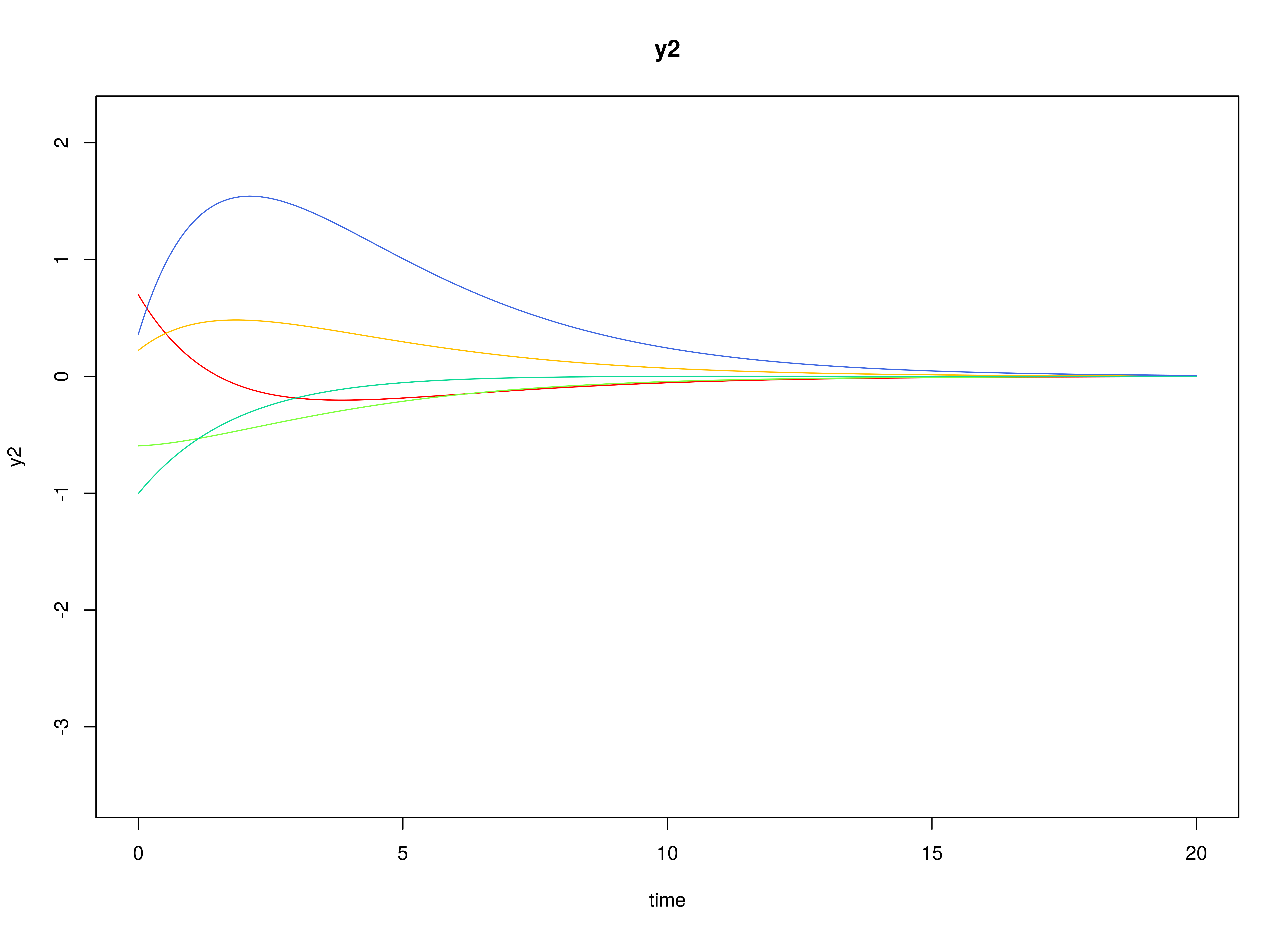
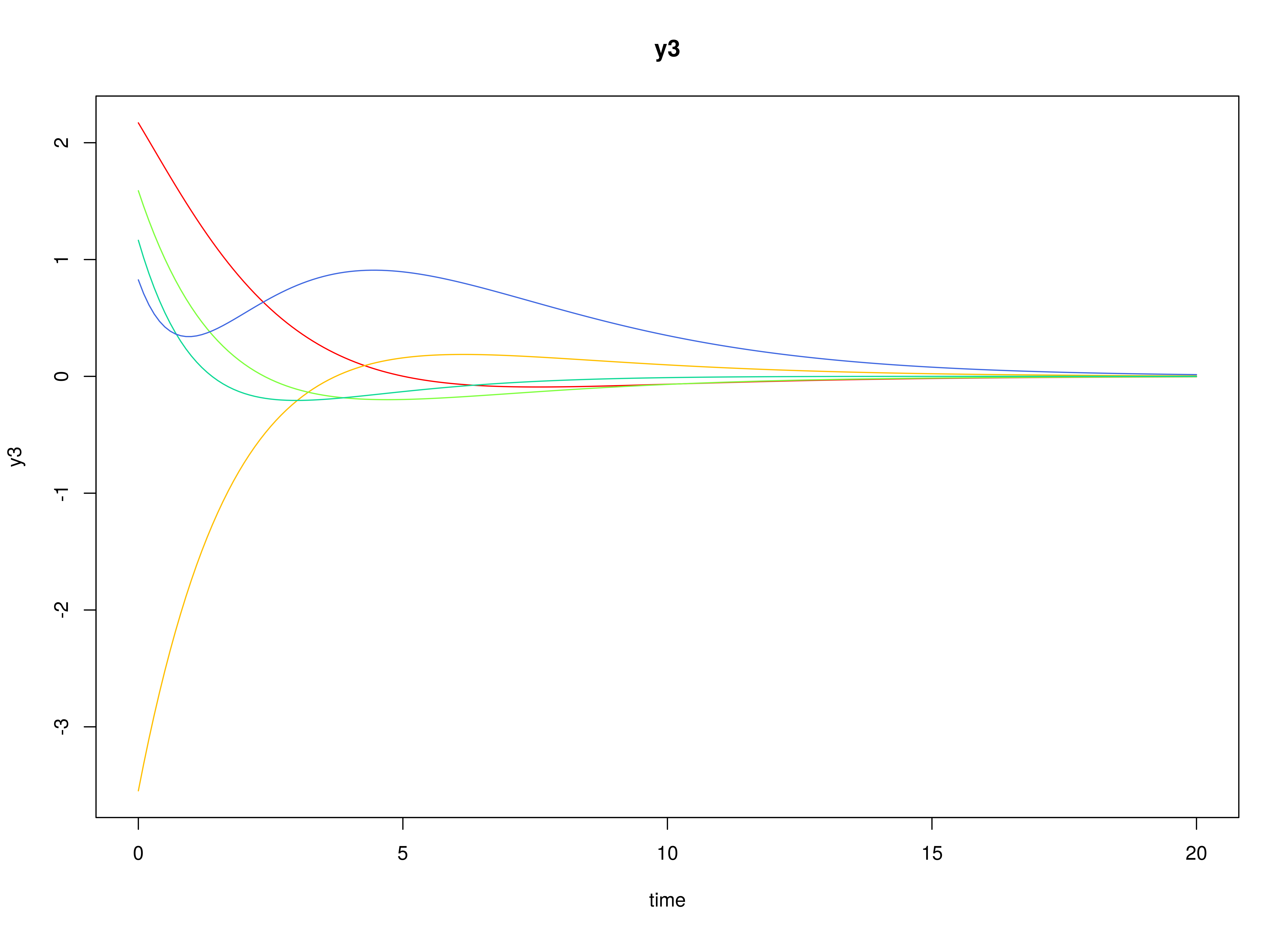
#> [3,] 0.0 0.0 0.2Visualizing the Dynamics Without Measurement Error and Process Noise (n = 5 with Different Initial Condition)
Using the SimSSMOUFixed Function from the
simStateSpace Package to Simulate Data
library(simStateSpace)
sim <- SimSSMOUFixed(
n = n,
time = time,
delta_t = delta_t,
mu0 = mu0,
sigma0_l = sigma0_l,
mu = mu,
phi = phi,
sigma_l = sigma_l,
nu = nu,
lambda = lambda,
theta_l = theta_l,
type = 0
)
data <- as.data.frame(sim)
head(data)
#> id time y1 y2 y3
#> 1 1 0.0 0.29937539 -1.37581548 1.3779071
#> 2 1 0.1 -0.98770381 -0.03632195 0.8363080
#> 3 1 0.2 0.33221051 -0.40321664 1.2054318
#> 4 1 0.3 -0.09485392 -0.82030556 1.0272653
#> 5 1 0.4 -1.50322069 -0.36841853 0.1821731
#> 6 1 0.5 -0.75049839 0.35752476 0.2862544
plot(sim)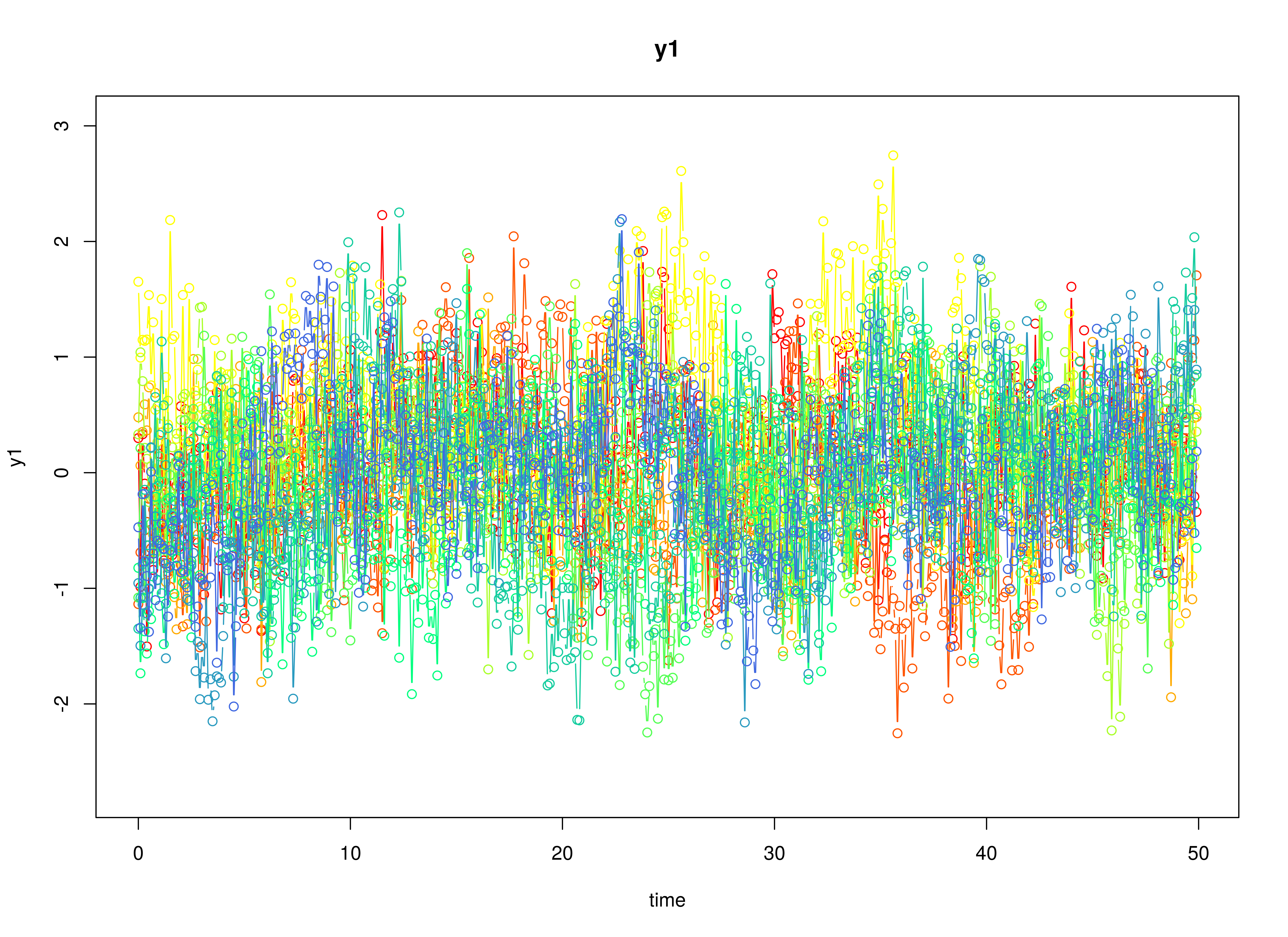
Model Fitting
The FitCTVARIDMx function fits a CT-VAR model on each
individual
.
The argument theta_fixed = FALSE is used here to model the
measurement error variances.
library(fitCTVARMx)
fit <- FitCTVARIDMx(
data = data,
observed = paste0("y", seq_len(k)),
id = "id",
time = "time",
theta_fixed = FALSE,
ncores = parallel::detectCores()
)
fit
#>
#> Means of the estimated paramaters per individual.
#> phi_11 phi_21 phi_31 phi_12 phi_22 phi_32
#> -0.99722949 0.95122711 -0.80239749 0.42068315 -0.67971580 1.03223527
#> phi_13 phi_23 phi_33 sigma_11 sigma_22 sigma_33
#> -0.58344255 0.15686252 -0.96351172 0.30496054 0.08162716 0.07656524
#> theta_11 theta_22 theta_33
#> 0.19464192 0.18655239 0.20310336Multivariate Meta-Analysis
The MetaVARMx function performs multivariate
meta-analysis using the estimated parameters and the corresponding
sampling variance-covariance matrix for each individual
.
Estimates with the prefix b0 correspond to the estimates of
phi.
library(metaVAR)
meta <- MetaVARMx(
object = fit,
random = FALSE,
ncores = parallel::detectCores()
)
#> Running Model with 9 parameters
#>
#> Beginning initial fit attempt
#> Running Model with 9 parameters
#>
#> Lowest minimum so far: -64.1091062816891
#>
#> Solution found#>
#> Solution found! Final fit=-64.109106 (started at 544.82025) (1 attempt(s): 1 valid, 0 errors)
#> Start values from best fit:
#> -0.430268780300005,0.922592460531924,-0.616172503758499,0.0719151003797164,-0.644603539281568,0.80303030596861,-0.110515674133675,0.103613670327686,-0.664549169846479
summary(meta)
#> est se z p 2.5% 97.5%
#> b0_1 -0.4303 0.1439 -2.9900 0.0028 -0.7123 -0.1482
#> b0_2 0.9226 0.0780 11.8288 0.0000 0.7697 1.0755
#> b0_3 -0.6162 0.0722 -8.5310 0.0000 -0.7577 -0.4746
#> b0_4 0.0719 0.1216 0.5913 0.5543 -0.1665 0.3103
#> b0_5 -0.6446 0.0723 -8.9206 0.0000 -0.7862 -0.5030
#> b0_6 0.8030 0.0667 12.0306 0.0000 0.6722 0.9339
#> b0_7 -0.1105 0.0967 -1.1433 0.2529 -0.3000 0.0789
#> b0_8 0.1036 0.0627 1.6515 0.0986 -0.0194 0.2266
#> b0_9 -0.6645 0.0580 -11.4613 0.0000 -0.7782 -0.5509