Model
The measurement model is given by where , , and are random variables and , , and are model parameters. represents a vector of observed random variables, a vector of latent random variables, and a vector of random measurement errors, at time and individual . denotes a vector of intercepts, a matrix of factor loadings, and the covariance matrix of .
An alternative representation of the measurement error is given by where is a vector of independent standard normal random variables and .
The dynamic structure is given by where is the long-term mean or equilibrium level, is the rate of mean reversion, determining how quickly the variable returns to its mean, is the matrix of volatility or randomness in the process, and is a Wiener process or Brownian motion, which represents random fluctuations.
Data Generation
Notation
Let be the number of time points and be the number of individuals.
Let the measurement model intecept vector be given by
Let the factor loadings matrix be given by
Let the measurement error covariance matrix be given by
Let the initial condition be given by
Let the long-term mean vector be given by
Let the rate of mean reversion matrix be given by
Let the dynamic process noise covariance matrix be given by
Let .
R Function Arguments
n
#> [1] 100
time
#> [1] 1000
delta_t
#> [1] 0.1
mu0
#> [1] 0 0 0
sigma0
#> [,1] [,2] [,3]
#> [1,] 0.3425148 0.3296023 0.0343817
#> [2,] 0.3296023 0.5664625 0.2545955
#> [3,] 0.0343817 0.2545955 0.2999909
sigma0_l # sigma0_l <- t(chol(sigma0))
#> [,1] [,2] [,3]
#> [1,] 0.58524763 0.0000000 0.0000000
#> [2,] 0.56318429 0.4992855 0.0000000
#> [3,] 0.05874726 0.4436540 0.3157701
mu
#> [1] 0 0 0
phi
#> [,1] [,2] [,3]
#> [1,] -0.357 0.000 0.000
#> [2,] 0.771 -0.511 0.000
#> [3,] -0.450 0.729 -0.693
sigma
#> [,1] [,2] [,3]
#> [1,] 0.24455556 0.02201587 -0.05004762
#> [2,] 0.02201587 0.07067800 0.01539456
#> [3,] -0.05004762 0.01539456 0.07553061
sigma_l # sigma_l <- t(chol(sigma))
#> [,1] [,2] [,3]
#> [1,] 0.49452559 0.0000000 0.000000
#> [2,] 0.04451917 0.2620993 0.000000
#> [3,] -0.10120330 0.0759256 0.243975
nu
#> [1] 0 0 0
lambda
#> [,1] [,2] [,3]
#> [1,] 1 0 0
#> [2,] 0 1 0
#> [3,] 0 0 1
theta
#> [,1] [,2] [,3]
#> [1,] 0.2 0.0 0.0
#> [2,] 0.0 0.2 0.0
#> [3,] 0.0 0.0 0.2
theta_l # theta_l <- t(chol(theta))
#> [,1] [,2] [,3]
#> [1,] 0.4472136 0.0000000 0.0000000
#> [2,] 0.0000000 0.4472136 0.0000000
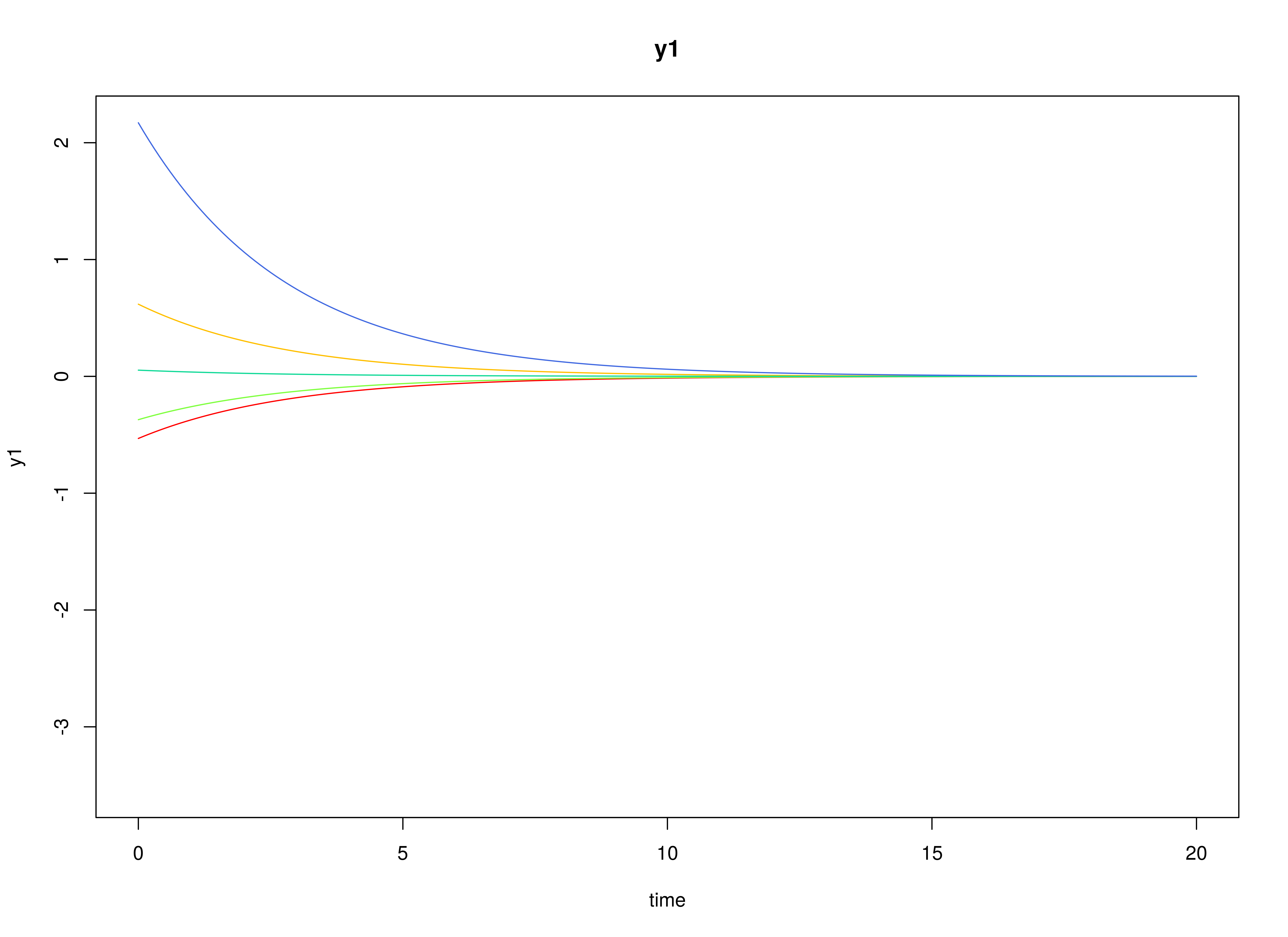
#> [3,] 0.0000000 0.0000000 0.4472136Visualizing the Dynamics Without Measurement Error and Process Noise (n = 5 with Different Initial Condition)


Using the SimSSMOUFixed Function from the
simStateSpace Package to Simulate Data
library(simStateSpace)
sim <- SimSSMOUFixed(
n = n,
time = time,
delta_t = delta_t,
mu0 = mu0,
sigma0_l = sigma0_l,
mu = mu,
phi = phi,
sigma_l = sigma_l,
nu = nu,
lambda = lambda,
theta_l = theta_l,
type = 0
)
data <- as.data.frame(sim)
head(data)
#> id time y1 y2 y3
#> 1 1 0.0 0.45047365 -1.2185550 0.6708638
#> 2 1 0.1 -0.84190461 0.1242594 0.1813493
#> 3 1 0.2 0.47289651 -0.2398710 0.5995107
#> 4 1 0.3 0.04089817 -0.6547109 0.4674929
#> 5 1 0.4 -1.37222946 -0.2010512 -0.3341885
#> 6 1 0.5 -0.62410106 0.5262251 -0.1892906
summary(data)
#> id time y1 y2
#> Min. : 1.00 Min. : 0.00 Min. :-3.387237 Min. :-3.561919
#> 1st Qu.: 25.75 1st Qu.:24.98 1st Qu.:-0.497505 1st Qu.:-0.593119
#> Median : 50.50 Median :49.95 Median : 0.002308 Median : 0.002867
#> Mean : 50.50 Mean :49.95 Mean : 0.002420 Mean : 0.001311
#> 3rd Qu.: 75.25 3rd Qu.:74.92 3rd Qu.: 0.507538 3rd Qu.: 0.600379
#> Max. :100.00 Max. :99.90 Max. : 3.381345 Max. : 3.415473
#> y3
#> Min. :-2.9091510
#> 1st Qu.:-0.4779403
#> Median : 0.0006008
#> Mean : 0.0019631
#> 3rd Qu.: 0.4815267
#> Max. : 3.0074722
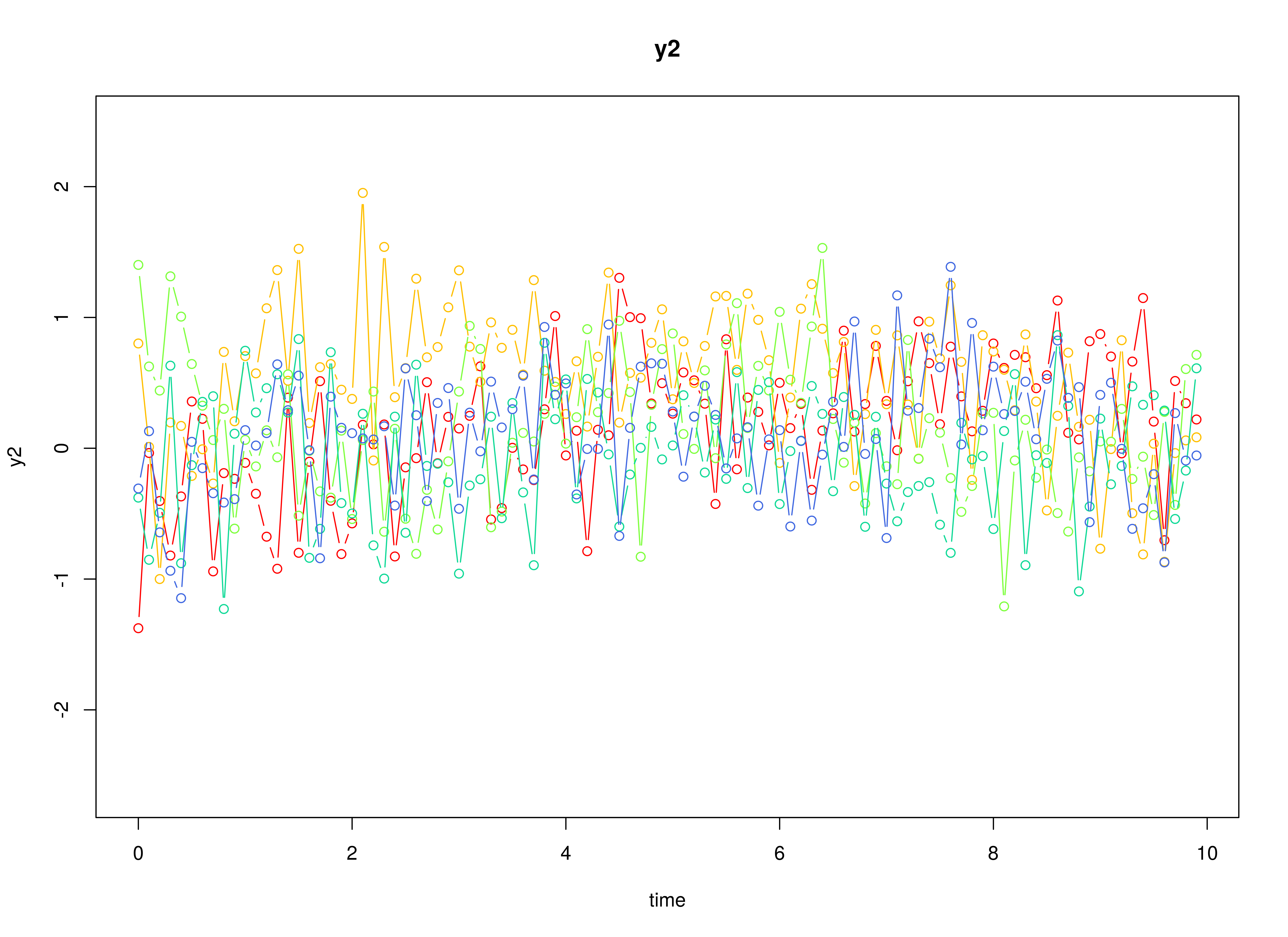
plot(sim)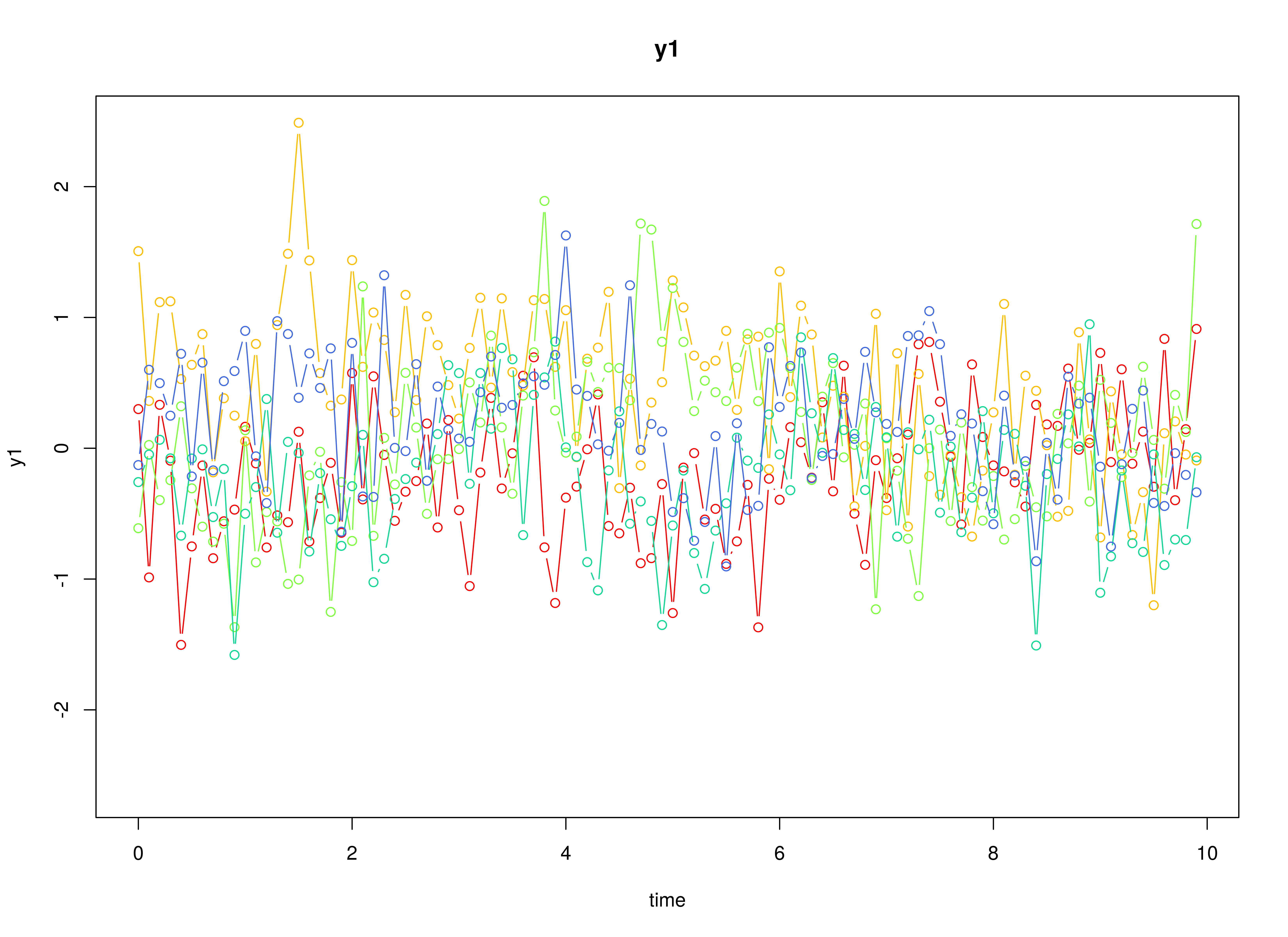

Model Fitting
Prepare Initial Condition
dynr_initial <- dynr::prep.initial(
values.inistate = mu0,
params.inistate = c("mu0_1_1", "mu0_2_1", "mu0_3_1"),
values.inicov = sigma0,
params.inicov = matrix(
data = c(
"sigma0_1_1", "sigma0_2_1", "sigma0_3_1",
"sigma0_2_1", "sigma0_2_2", "sigma0_3_2",
"sigma0_3_1", "sigma0_3_2", "sigma0_3_3"
),
nrow = 3
)
)Prepare Measurement Model
dynr_measurement <- dynr::prep.measurement(
values.load = diag(3),
params.load = matrix(data = "fixed", nrow = 3, ncol = 3),
state.names = c("eta_1", "eta_2", "eta_3"),
obs.names = c("y1", "y2", "y3")
)Prepare Dynamic Process
dynr_dynamics <- dynr::prep.formulaDynamics(
formula = list(
eta_1 ~ (phi_1_1 * (eta_1 - mu_1_1)) + (phi_1_2 * (eta_2 - mu_2_1)) + (phi_1_3 * (eta_3 - mu_3_1)),
eta_2 ~ (phi_2_1 * (eta_1 - mu_1_1)) + (phi_2_2 * (eta_2 - mu_2_1)) + (phi_2_3 * (eta_3 - mu_3_1)),
eta_3 ~ (phi_3_1 * (eta_1 - mu_1_1)) + (phi_3_2 * (eta_2 - mu_2_1)) + (phi_3_3 * (eta_3 - mu_3_1))
),
startval = c(
mu_1_1 = mu[1], mu_2_1 = mu[2], mu_3_1 = mu[3],
phi_1_1 = phi[1, 1], phi_1_2 = phi[1, 2], phi_1_3 = phi[1, 3],
phi_2_1 = phi[2, 1], phi_2_2 = phi[2, 2], phi_2_3 = phi[2, 3],
phi_3_1 = phi[3, 1], phi_3_2 = phi[3, 2], phi_3_3 = phi[3, 3]
),
isContinuousTime = TRUE
)Prepare Process Noise
dynr_noise <- dynr::prep.noise(
values.latent = sigma,
params.latent = matrix(
data = c(
"sigma_1_1", "sigma_2_1", "sigma_3_1",
"sigma_2_1", "sigma_2_2", "sigma_3_2",
"sigma_3_1", "sigma_3_2", "sigma_3_3"
),
nrow = 3
),
values.observed = theta,
params.observed = matrix(
data = c(
"theta_1_1", "fixed", "fixed",
"fixed", "theta_2_2", "fixed",
"fixed", "fixed", "theta_3_3"
),
nrow = 3
)
)Prepare the Model
model <- dynr::dynr.model(
data = dynr_data,
initial = dynr_initial,
measurement = dynr_measurement,
dynamics = dynr_dynamics,
noise = dynr_noise,
outfile = "ou.c"
)Add lower and upper bounds to aid in the optimization.
model$lb[
c(
"phi_1_1",
"phi_1_2",
"phi_1_3",
"phi_2_1",
"phi_2_2",
"phi_2_3",
"phi_3_1",
"phi_3_2",
"phi_3_3"
)
] <- -1.5
model$ub[
c(
"phi_1_1",
"phi_1_2",
"phi_1_3",
"phi_2_1",
"phi_2_2",
"phi_2_3",
"phi_3_1",
"phi_3_2",
"phi_3_3"
)
] <- +1.5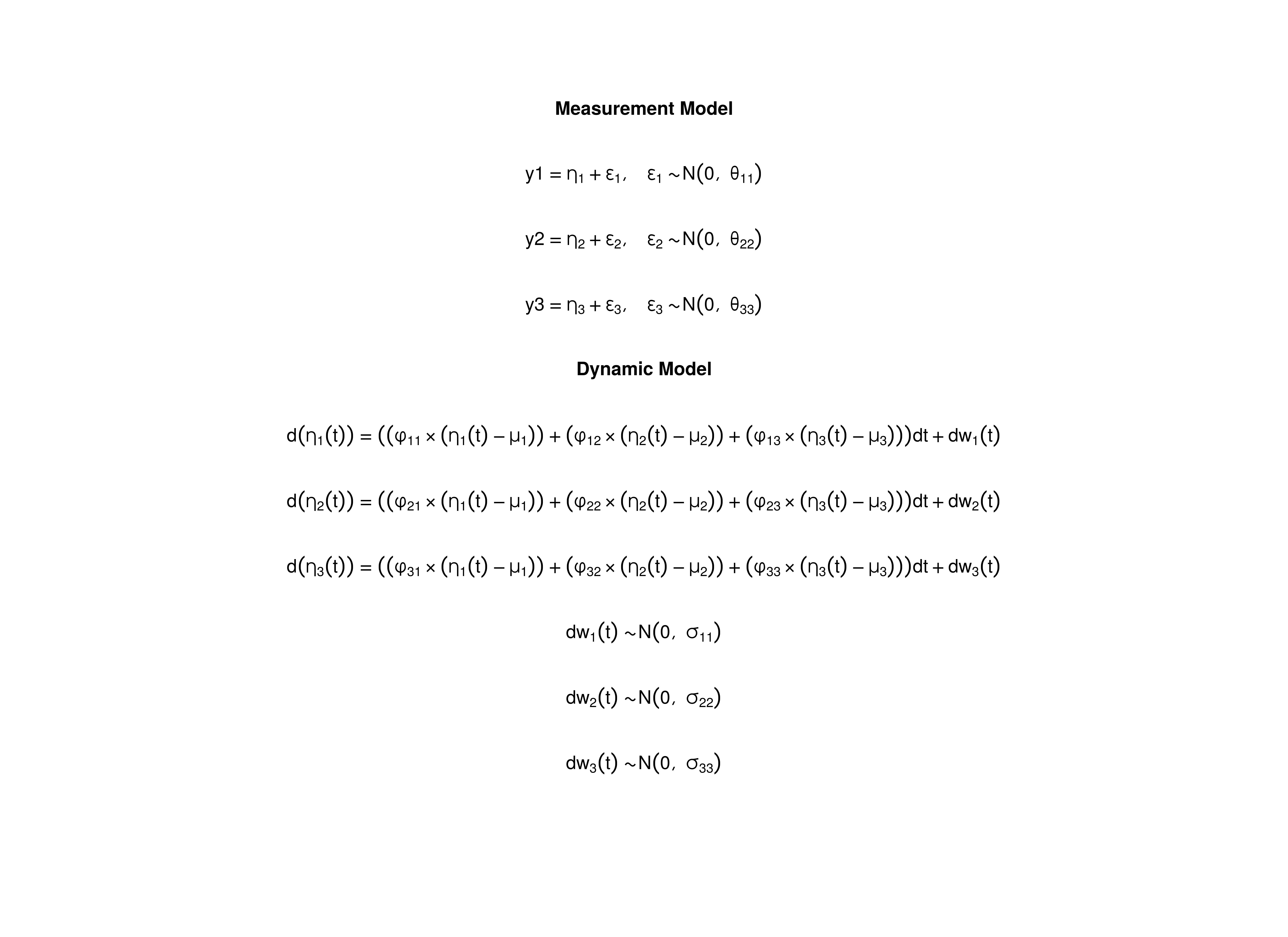
Fit the Model
results <- dynr::dynr.cook(
model,
debug_flag = TRUE,
verbose = FALSE
)
#> [1] "Get ready!!!!"
#> using C compiler: ‘gcc (Ubuntu 13.3.0-6ubuntu2~24.04.1) 13.3.0’
#> Optimization function called.
#> Starting Hessian calculation ...
#> Finished Hessian calculation.
#> Original exit flag: 3
#> Modified exit flag: 3
#> Optimization terminated successfully: ftol_rel or ftol_abs was reached.
#> Original fitted parameters: -0.001486414 -0.003474606 0.001459749 -0.3876957
#> 0.0497315 -0.05068424 0.7575202 -0.5020978 -0.001002782 -0.4483666 0.7166069
#> -0.6816382 -1.397824 0.08915739 -0.2066158 -2.670695 0.287372 -2.880188
#> -1.615787 -1.611792 -1.602987 0.01193792 -0.03514586 -0.0202138 -1.023004
#> 0.9898615 0.1951522 -1.492855 0.876229 -2.109101
#>
#> Transformed fitted parameters: -0.001486414 -0.003474606 0.001459749
#> -0.3876957 0.0497315 -0.05068424 0.7575202 -0.5020978 -0.001002782 -0.4483666
#> 0.7166069 -0.6816382 0.2471341 0.02203383 -0.05106181 0.07116856 0.01533478
#> 0.07238944 0.1987341 0.1995297 0.2012944 0.01193792 -0.03514586 -0.0202138
#> 0.3595134 0.3558685 0.07015983 0.5769907 0.2663636 0.3075816
#>
#> Doing end processing
#> Warning in sqrt(diag(iHess)): NaNs produced
#> Warning in sqrt(diag(x$inv.hessian)): NaNs produced
#> Warning: These parameters may have untrustworthy standard errors: sigma0_1_1,
#> sigma0_2_1.
#> Total Time: 39.33717
#> Backend Time: 39.33029Summary
summary(results)
#> Coefficients:
#> Estimate Std. Error t value ci.lower ci.upper Pr(>|t|)
#> mu_1_1 -0.001486 0.014463 -0.103 -0.029833 0.026860 0.4591
#> mu_2_1 -0.003475 0.023224 -0.150 -0.048992 0.042043 0.4405
#> mu_3_1 0.001460 0.014728 0.099 -0.027406 0.030326 0.4605
#> phi_1_1 -0.387696 0.039562 -9.800 -0.465235 -0.310156 <2e-16 ***
#> phi_1_2 0.049731 0.034658 1.435 -0.018196 0.117659 0.0757 .
#> phi_1_3 -0.050684 0.026390 -1.921 -0.102408 0.001040 0.0274 *
#> phi_2_1 0.757520 0.024418 31.023 0.709662 0.805379 <2e-16 ***
#> phi_2_2 -0.502098 0.021619 -23.225 -0.544470 -0.459726 <2e-16 ***
#> phi_2_3 -0.001003 0.016417 -0.061 -0.033180 0.031174 0.4756
#> phi_3_1 -0.448367 0.025634 -17.491 -0.498608 -0.398125 <2e-16 ***
#> phi_3_2 0.716607 0.022660 31.624 0.672194 0.761019 <2e-16 ***
#> phi_3_3 -0.681638 0.017286 -39.433 -0.715518 -0.647759 <2e-16 ***
#> sigma_1_1 0.247134 0.007041 35.098 0.233333 0.260935 <2e-16 ***
#> sigma_2_1 0.022034 0.002723 8.092 0.016697 0.027371 <2e-16 ***
#> sigma_3_1 -0.051062 0.002879 -17.733 -0.056706 -0.045418 <2e-16 ***
#> sigma_2_2 0.071169 0.001970 36.120 0.067307 0.075030 <2e-16 ***
#> sigma_3_2 0.015335 0.001384 11.076 0.012621 0.018048 <2e-16 ***
#> sigma_3_3 0.072389 0.002092 34.601 0.068289 0.076490 <2e-16 ***
#> theta_1_1 0.198734 0.001174 169.300 0.196433 0.201035 <2e-16 ***
#> theta_2_2 0.199530 0.001002 199.040 0.197565 0.201494 <2e-16 ***
#> theta_3_3 0.201294 0.001016 198.086 0.199303 0.203286 <2e-16 ***
#> mu0_1_1 0.011938 0.068751 0.174 -0.122812 0.146687 0.4311
#> mu0_2_1 -0.035146 0.088382 -0.398 -0.208371 0.138079 0.3454
#> mu0_3_1 -0.020214 0.064115 -0.315 -0.145876 0.105448 0.3763
#> sigma0_1_1 0.359513 NaN NA NaN NaN NA
#> sigma0_2_1 0.355868 NaN NA NaN NaN NA
#> sigma0_3_1 0.070160 0.048955 1.433 -0.025791 0.166111 0.0759 .
#> sigma0_2_2 0.576991 0.091692 6.293 0.397278 0.756704 <2e-16 ***
#> sigma0_3_2 0.266364 0.065448 4.070 0.138088 0.394639 <2e-16 ***
#> sigma0_3_3 0.307582 0.051535 5.968 0.206575 0.408589 <2e-16 ***
#> ---
#> Signif. codes: 0 '***' 0.001 '**' 0.01 '*' 0.05 '.' 0.1 ' ' 1
#>
#> -2 log-likelihood value at convergence = 429162.30
#> AIC = 429222.30
#> BIC = 429507.68Parameter Estimates
mu_hat
#> [1] -0.001486414 -0.003474606 0.001459749
phi_hat
#> [,1] [,2] [,3]
#> [1,] -0.3876957 0.0497315 -0.050684239
#> [2,] 0.7575202 -0.5020978 -0.001002782
#> [3,] -0.4483666 0.7166069 -0.681638168
sigma_hat
#> [,1] [,2] [,3]
#> [1,] 0.24713412 0.02203383 -0.05106181
#> [2,] 0.02203383 0.07116856 0.01533478
#> [3,] -0.05106181 0.01533478 0.07238944
theta_hat
#> [,1] [,2] [,3]
#> [1,] 0.1987341 0.0000000 0.0000000
#> [2,] 0.0000000 0.1995297 0.0000000
#> [3,] 0.0000000 0.0000000 0.2012944
mu0_hat
#> [1] 0.01193792 -0.03514586 -0.02021380
sigma0_hat
#> [,1] [,2] [,3]
#> [1,] 0.35951339 0.3558685 0.07015983
#> [2,] 0.35586848 0.5769907 0.26636364
#> [3,] 0.07015983 0.2663636 0.30758162
beta_var1_hat <- expm::expm(phi_hat)
beta_var1_hat
#> [,1] [,2] [,3]
#> [1,] 0.6952025 0.02134302 -0.03008700
#> [2,] 0.4901232 0.61421636 -0.01200378
#> [3,] -0.1042377 0.39410024 0.50935760