Continuous-Time Vector Autoregressive Model (center = TRUE)
Ivan Jacob Agaloos Pesigan
2026-06-08
Source:vignettes/ct-center-true.Rmd
ct-center-true.RmdModel
The measurement model is given by where , and are random variables.
The dynamic structure is given by where is a Wiener process or Brownian motion, which represents random fluctuations, , and are random variables, and , , and are model parameters. Here, is a vector of latent variables at time and individual , and represents a vector of latent variables at time and individual . denotes a vector of set-points, a matrix of auto and cross effect coefficients, and the covariance matrix of the random fluctuations.
Data Generation
Notation
Let be the number of time points and be the number of individuals.
Let the initial condition be given by
Let the set-point vector be given by
Let the drift matrix be given by
Let the dynamic process noise be given by
R Function Arguments
n
#> [1] 100
time
#> [1] 1000
mu0
#> [1] 2.564817 5.704328 4.749642
sigma0
#> [,1] [,2] [,3]
#> [1,] 0.14018366 0.1245498 0.02644023
#> [2,] 0.12454982 0.2858063 0.14350238
#> [3,] 0.02644023 0.1435024 0.20595577
sigma0_l # sigma0_l <- t(chol(sigma0))
#> [,1] [,2] [,3]
#> [1,] 0.37441109 0.0000000 0.0000000
#> [2,] 0.33265526 0.4185054 0.0000000
#> [3,] 0.07061819 0.2867606 0.3445827
alpha
#> [1] 0.9148060 0.9370754 0.2861395
beta
#> [,1] [,2] [,3]
#> [1,] -0.3566749 0.0000000 0.0000000
#> [2,] 0.7707534 -0.5108256 0.0000000
#> [3,] -0.4499449 0.7292862 -0.6931472
psi
#> [,1] [,2] [,3]
#> [1,] 0.1 0.0 0.0
#> [2,] 0.0 0.1 0.0
#> [3,] 0.0 0.0 0.1
psi_l # psi_l <- t(chol(psi))
#> [,1] [,2] [,3]
#> [1,] 0.3162278 0.0000000 0.0000000
#> [2,] 0.0000000 0.3162278 0.0000000
#> [3,] 0.0000000 0.0000000 0.3162278
# set-point
mu
#> [1] 2.564817 5.704328 4.749642
nu
#> [1] 0 0 0
lambda
#> [,1] [,2] [,3]
#> [1,] 1 0 0
#> [2,] 0 1 0
#> [3,] 0 0 1
theta
#> [,1] [,2] [,3]
#> [1,] 0 0 0
#> [2,] 0 0 0
#> [3,] 0 0 0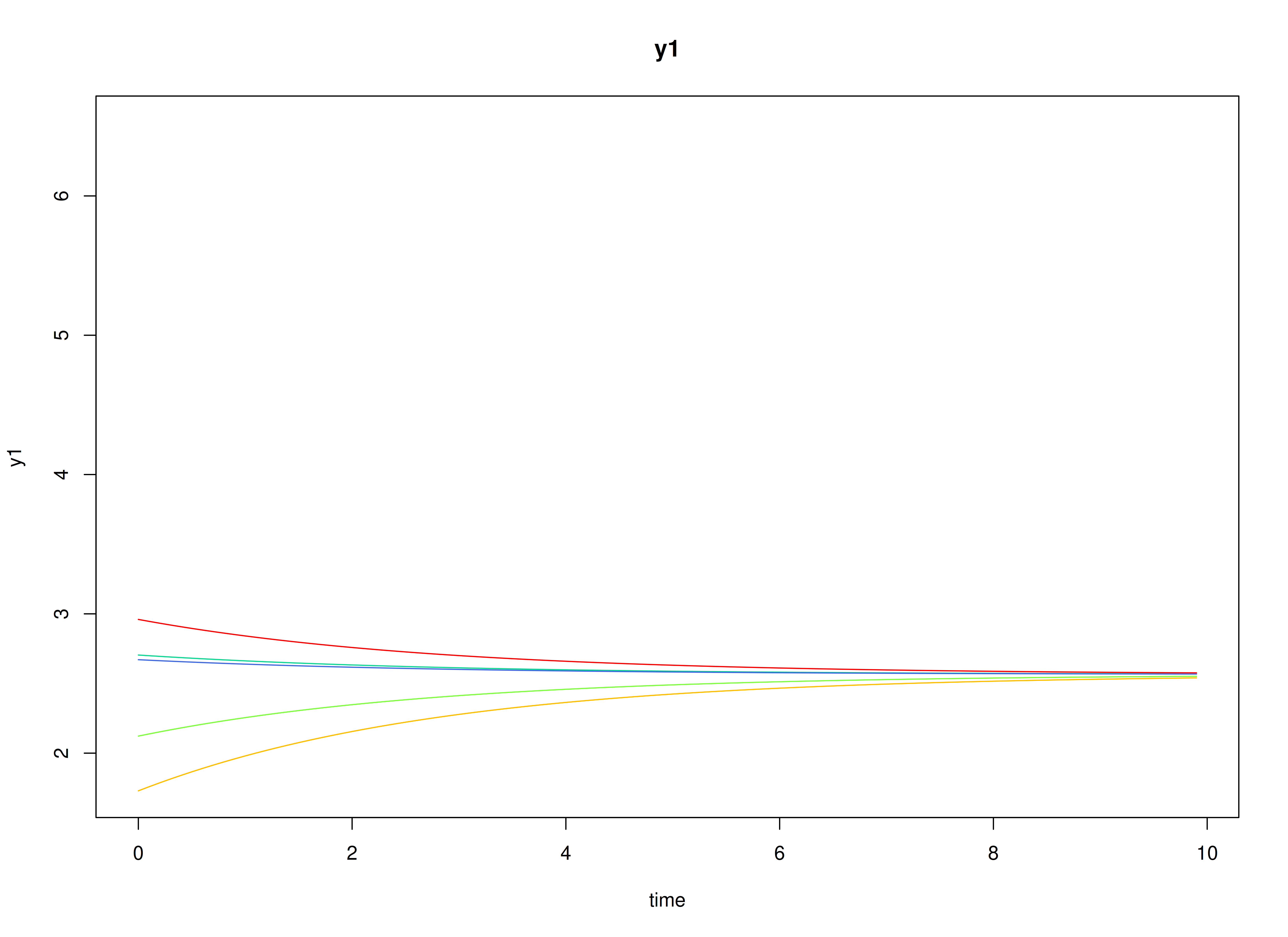
Using the SimSSMLinSDEFixed Function from the
simStateSpace Package to Simulate Data
Note: The
SimSSMLinSDEFixedfunction uses a different set of parameter names. Seehelp(SimSSMLinSDEFixed)for more details.
library(simStateSpace)
sim <- SimSSMLinSDEFixed(
n = n,
time = time,
delta_t = 0.1,
mu0 = mu0,
sigma0_l = sigma0_l,
iota = alpha,
phi = beta,
sigma_l = psi_l,
nu = nu,
lambda = lambda,
theta_l = theta_l
)
data <- as.data.frame(sim)
head(data)
#> id time y1 y2 y3
#> 1 1 0.0 2.713440 6.616955 5.826304
#> 2 1 0.1 2.788586 6.625107 5.689081
#> 3 1 0.2 2.752473 6.722281 5.621800
#> 4 1 0.3 2.504163 6.706956 5.588982
#> 5 1 0.4 2.541571 6.800410 5.517594
#> 6 1 0.5 2.499550 6.830410 5.316913
summary(data)
#> id time y1 y2
#> Min. : 1.00 Min. : 0.00 Min. :1.197 Min. :3.688
#> 1st Qu.: 25.75 1st Qu.:24.98 1st Qu.:2.307 1st Qu.:5.342
#> Median : 50.50 Median :49.95 Median :2.561 Median :5.709
#> Mean : 50.50 Mean :49.95 Mean :2.561 Mean :5.709
#> 3rd Qu.: 75.25 3rd Qu.:74.92 3rd Qu.:2.811 3rd Qu.:6.067
#> Max. :100.00 Max. :99.90 Max. :4.172 Max. :8.164
#> y3
#> Min. :3.009
#> 1st Qu.:4.455
#> Median :4.751
#> Mean :4.755
#> 3rd Qu.:5.054
#> Max. :6.718
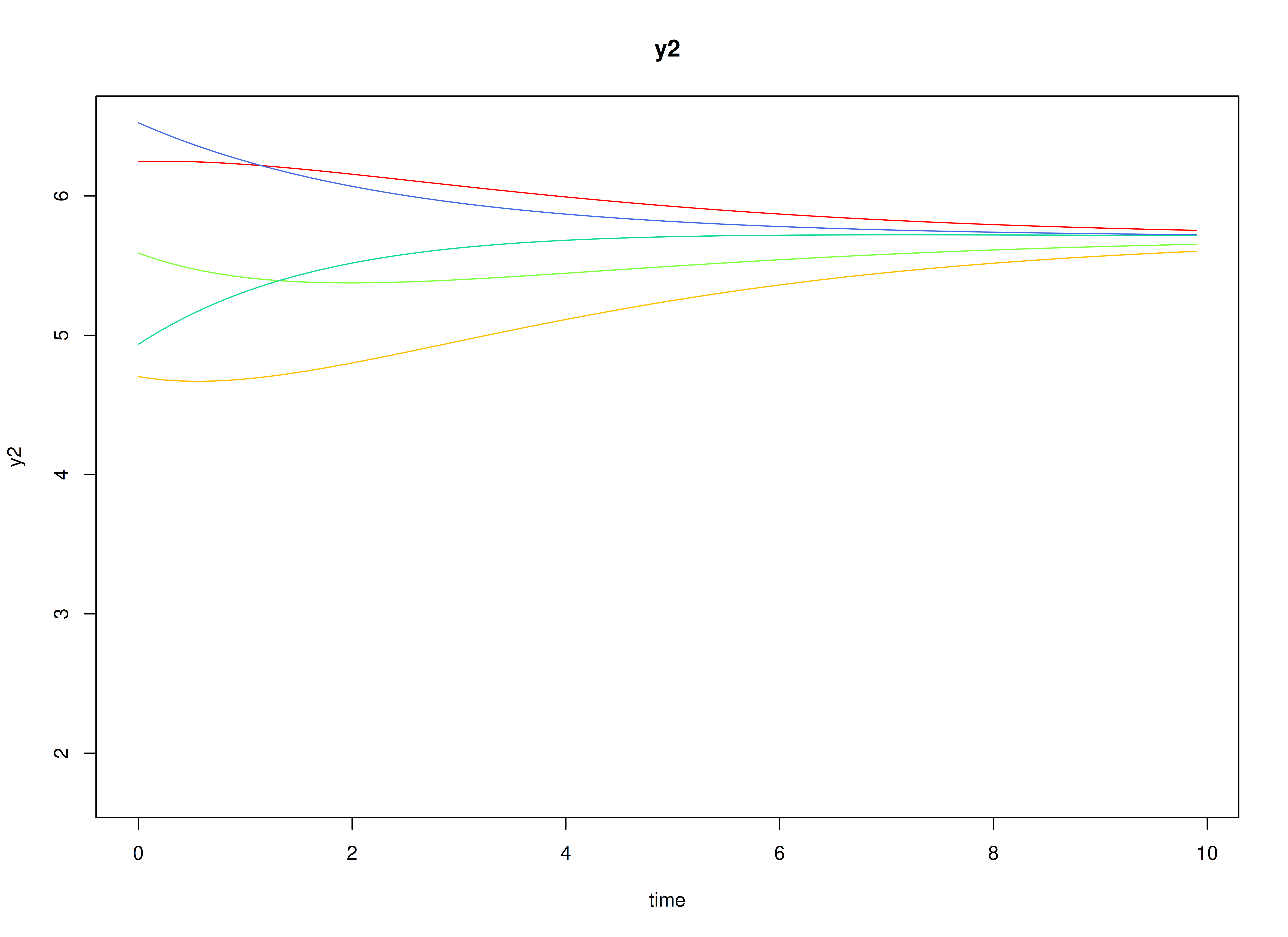
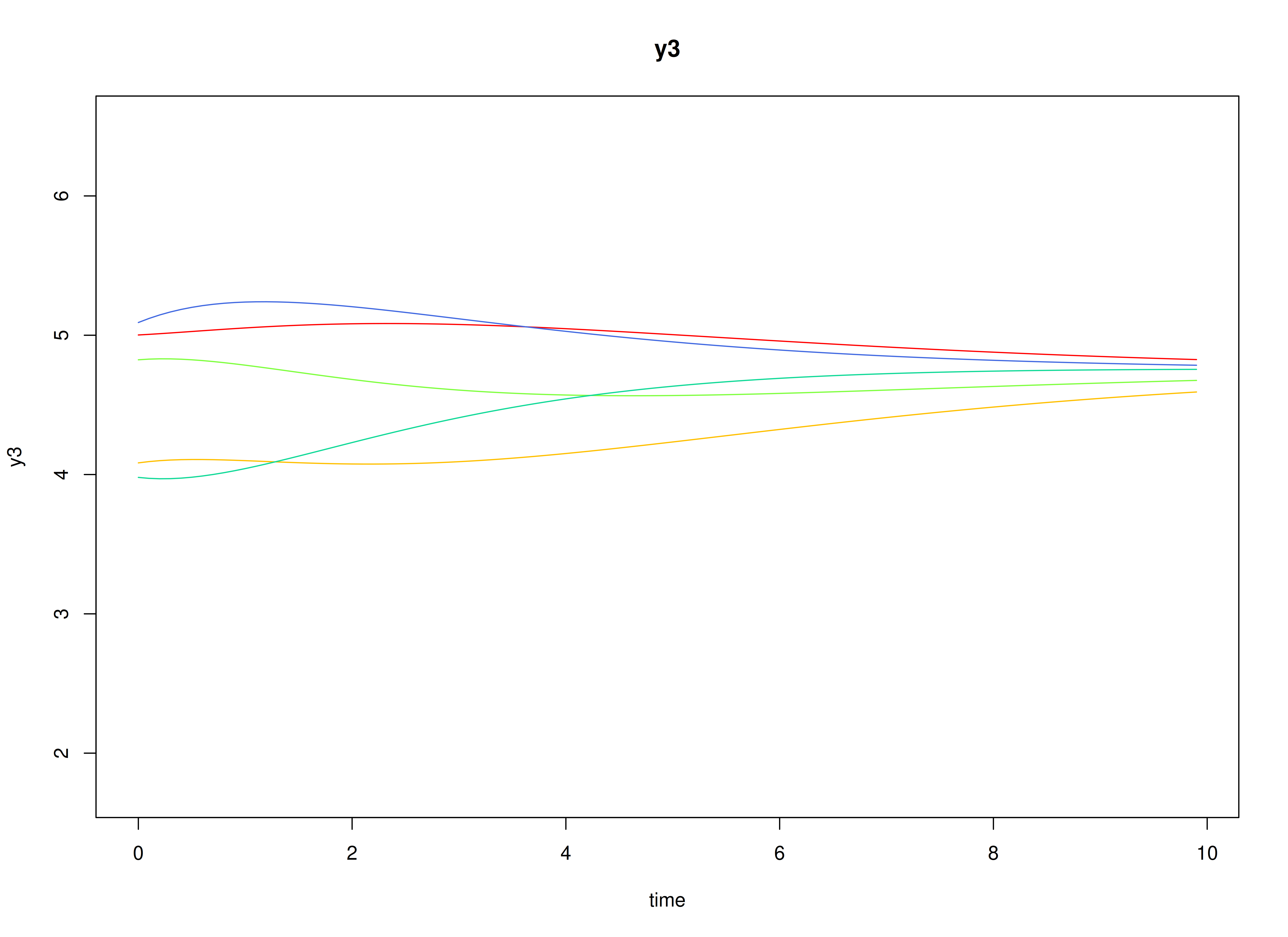
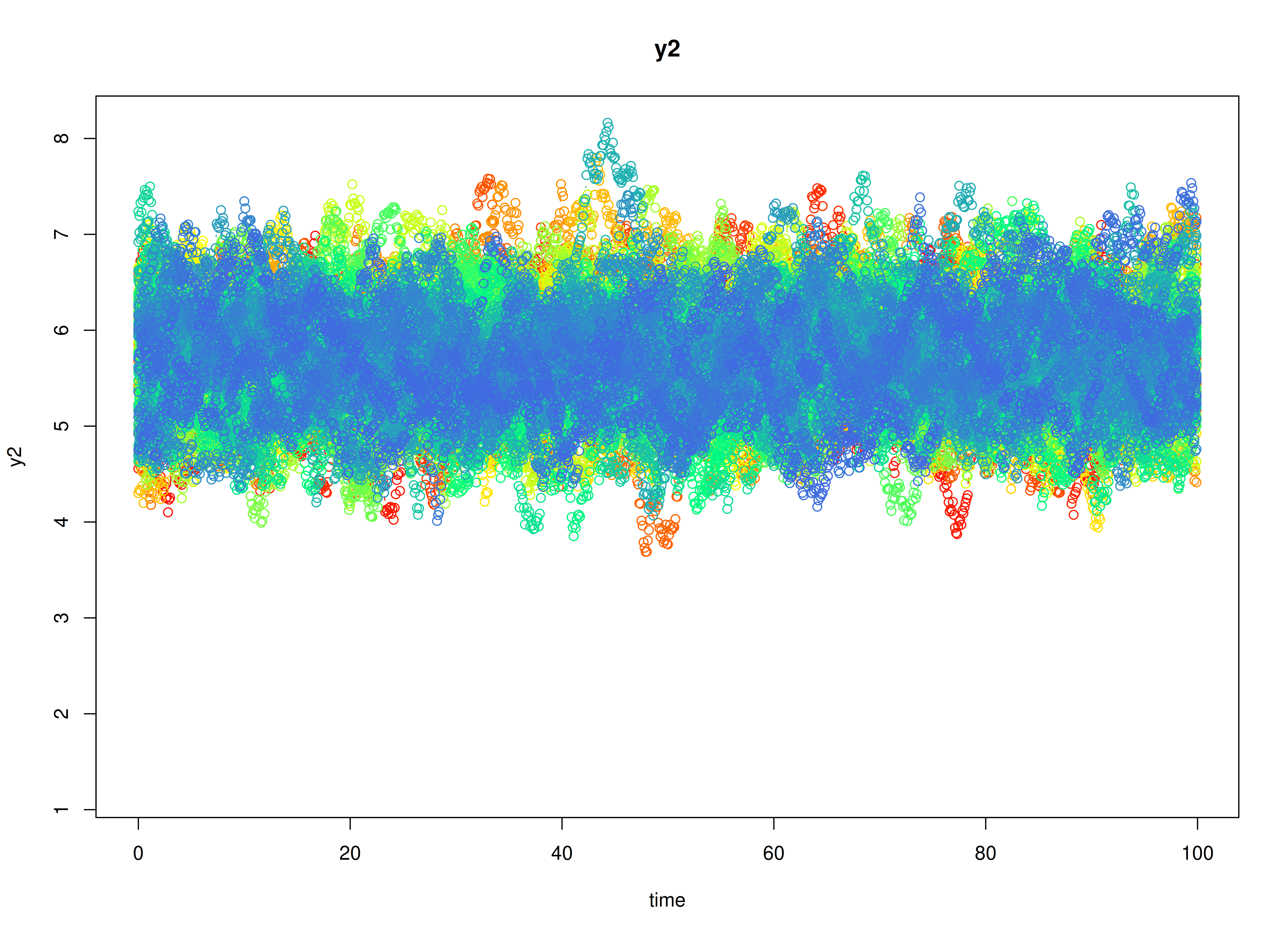
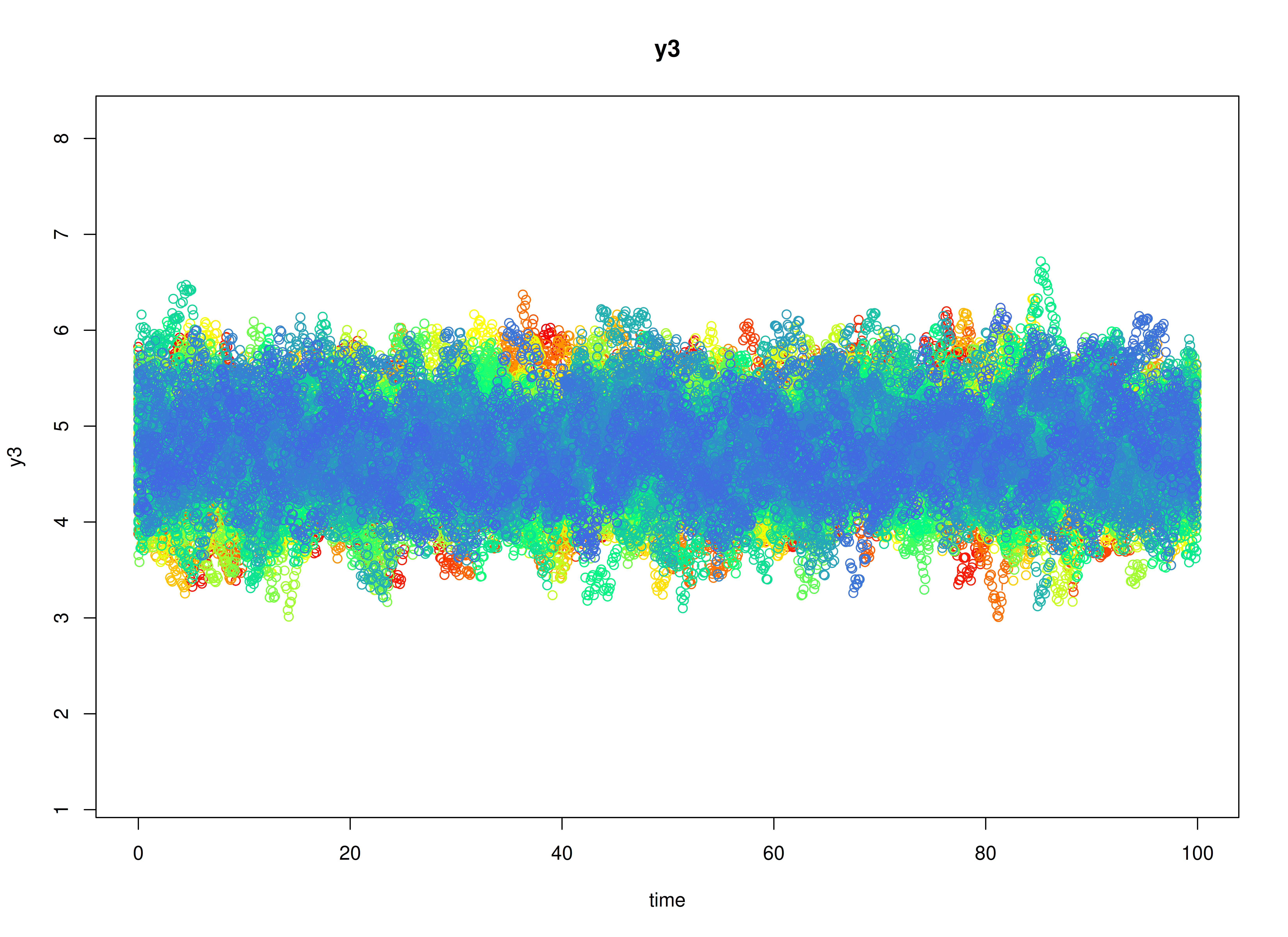
plot(sim)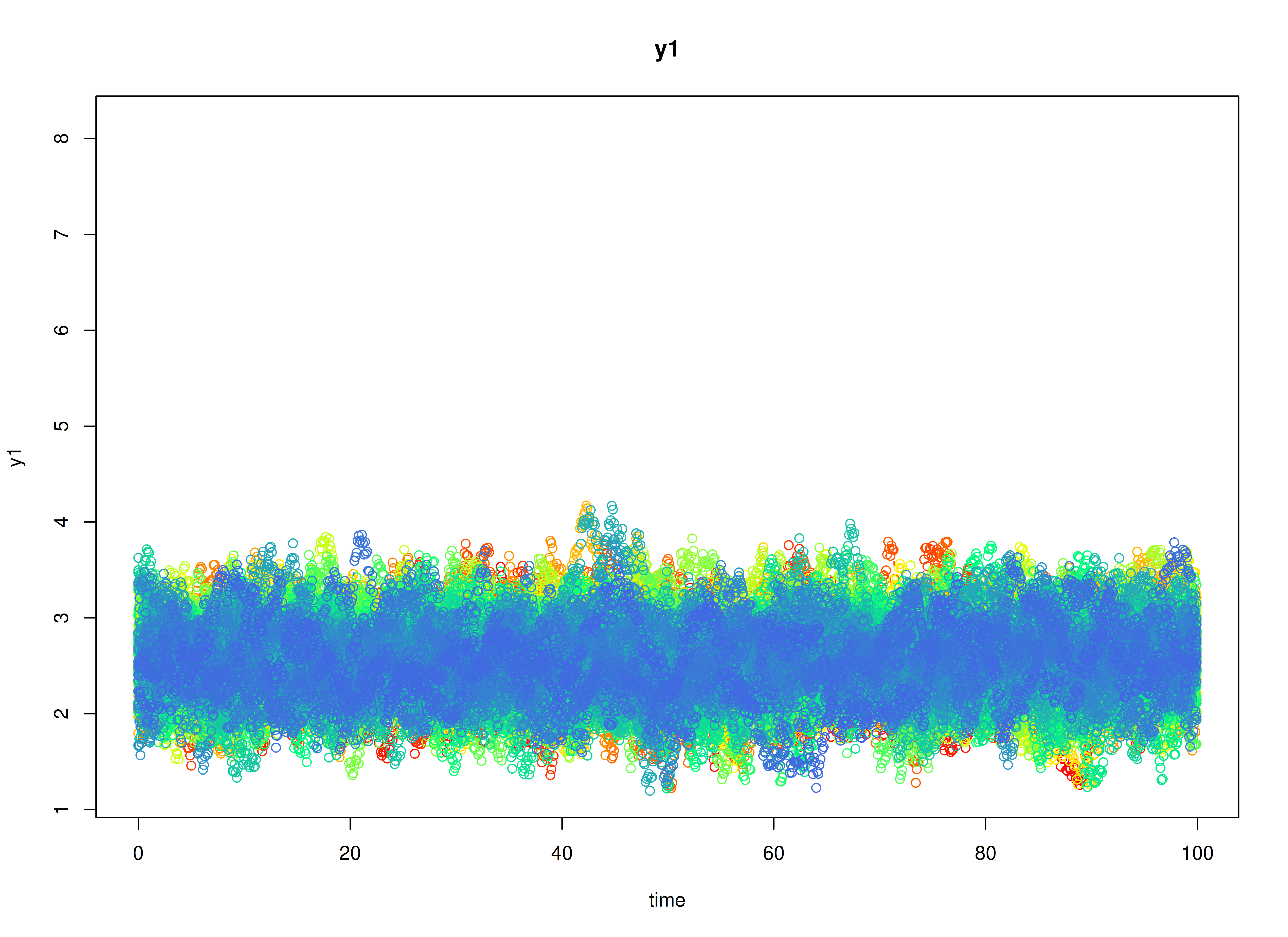
Model Fitting
The FitVARMxID function fits a CT-VAR model on each
individual
.
Note: Consider using the argument
ncoresto use multiple cores for parallel processing.
fit <- FitVARMxID(
data = data,
observed = c("y1", "y2", "y3"),
id = "id",
ct = TRUE,
time = "time",
center = TRUE,
ncores = parallel::detectCores()
)Parameter estimates
summary(
fit,
means = TRUE,
ncores = parallel::detectCores()
)
#> Call:
#> FitVARMxID(data = data, observed = c("y1", "y2", "y3"), id = "id",
#> time = "time", ct = TRUE, center = TRUE, ncores = parallel::detectCores())
#>
#> Convergence:
#> 100.0%
#>
#> Means of the estimated paramaters per individual.
#> mu[1,1] mu[2,1] mu[3,1] beta[1,1] beta[2,1] beta[3,1] beta[1,2] beta[2,2]
#> 2.5623 5.7117 4.7566 -0.4118 0.7893 -0.4533 -0.0064 -0.5344
#> beta[3,2] beta[1,3] beta[2,3] beta[3,3] psi[1,1] psi[2,1] psi[3,1] psi[2,2]
#> 0.7514 -0.0148 -0.0200 -0.7402 0.1007 0.0003 -0.0002 0.0993
#> psi[3,2] psi[3,3]
#> 0.0003 0.1003